Thwaites FAQ: On May 21, 2020, PI and Icefin Lead Scientist Dr. Britney Schmidt participated in a Twitter Q&A session with Bulletin of the Atomic Scientists, and answered some of your most frequently asked questions about Thwaites and Icefin as part of the #ThwaitesGlacierChat. If you’re new to Thwaites and/or Icefin, this is a great place to start! If you’ve been following us for a while, here’s your chance for a more in-depth understanding of what we do, and why it matters.
Bulletin Atomic: The International Thwaites Glacier Collaboration is a 5-year project involving a huge number of scientists, ships, and aircraft to study the Antarctic. Why is this research important? What are you hoping to find?
Dr. Schmidt: Thwaites Glacier is one of the fastest changing glaciers in Antarctica. We want to understand how that works, and how quickly climate change is affecting the glacier. One of the ways to do this is to make measurements up close and personal with the processes affecting the ice, like melting from the warming ocean.
Bulletin Atomic: What is the difference between sea ice and the ice on land? Do they each contribute to sea-level rise?
Dr. Schmidt: Ice on land (glaciers) is formed from compacting snow, but sea ice forms from ocean freezing. Glaciers like Thwaites enter the ocean below sea level. What this means is that glaciers can be easily affected (melting) by the ocean, and when they speed up, they add ice and water to the ocean, changing sea level. So the melting of sea ice can cause more glacier melting, through warming of the ocean, which means sea level rise. While sea ice doesn’t change sea level, as it melts, the bright ice that reflects sunlight is replaced by dark ocean that absorbs heat, which accelerates ocean warming.
Bulletin Atomic: MELT Project is part of the International Thwaites Glacier Collaboration. What is that project and how does it fit into the overall effort to understand the Thwaites Glacier?
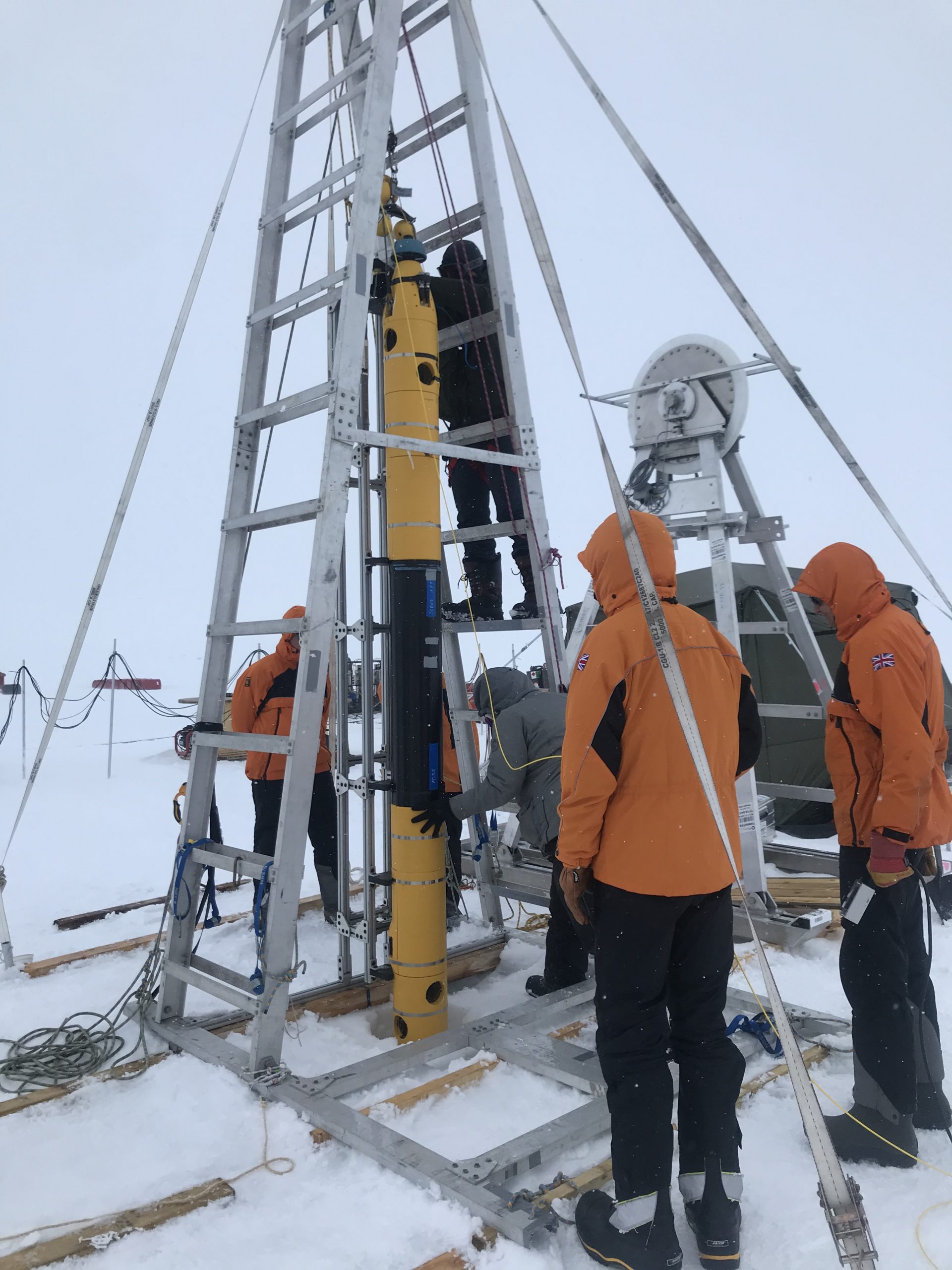
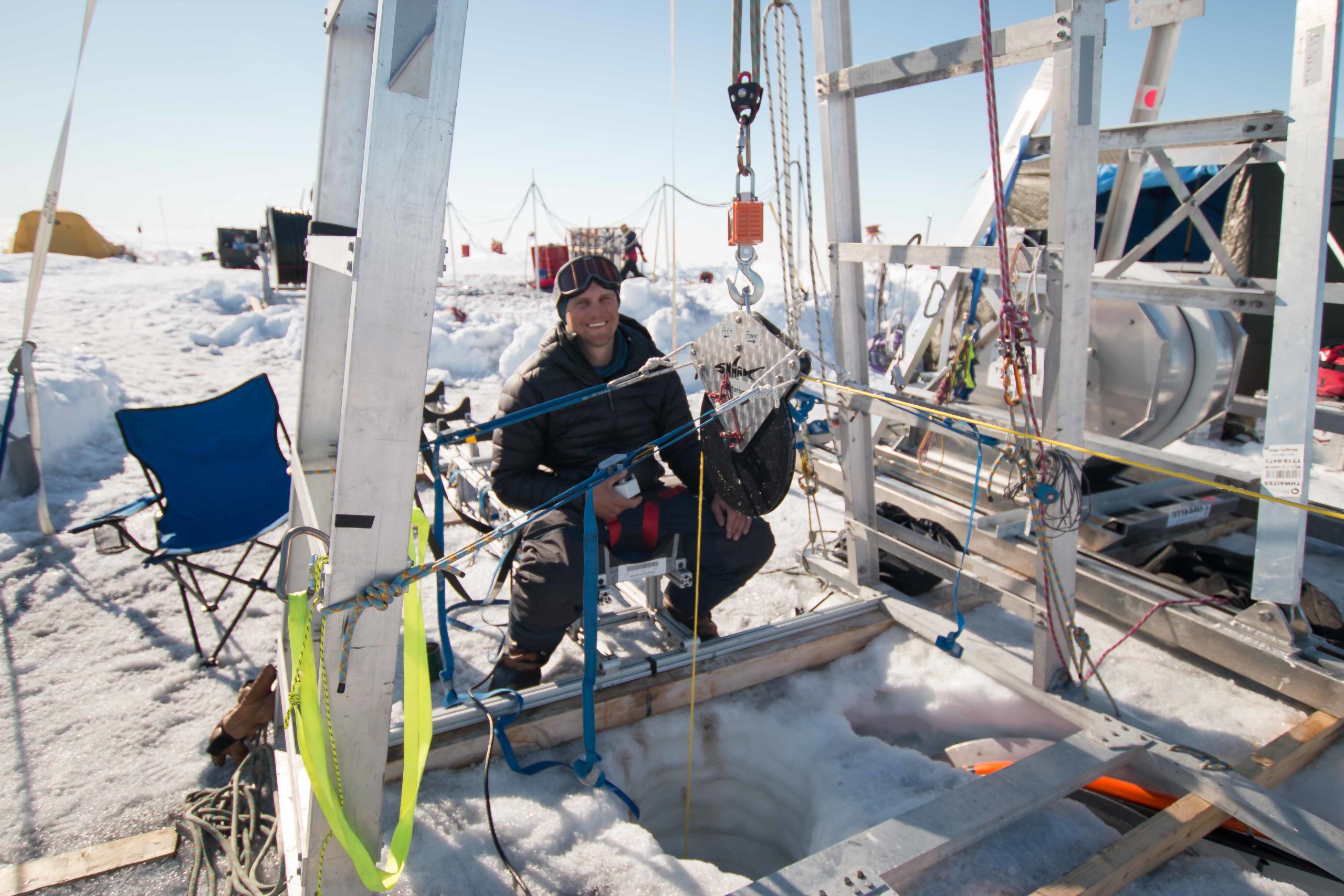
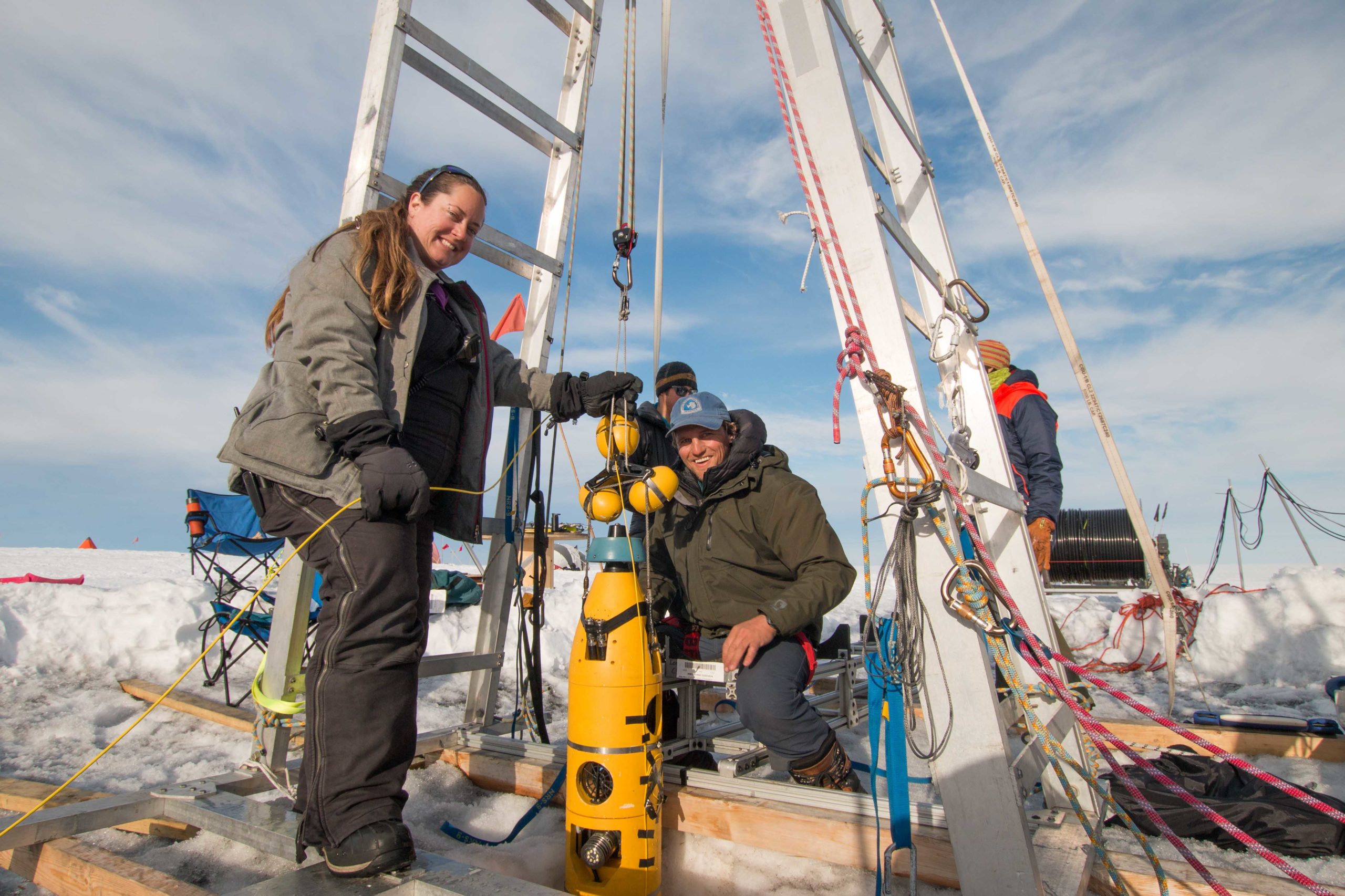
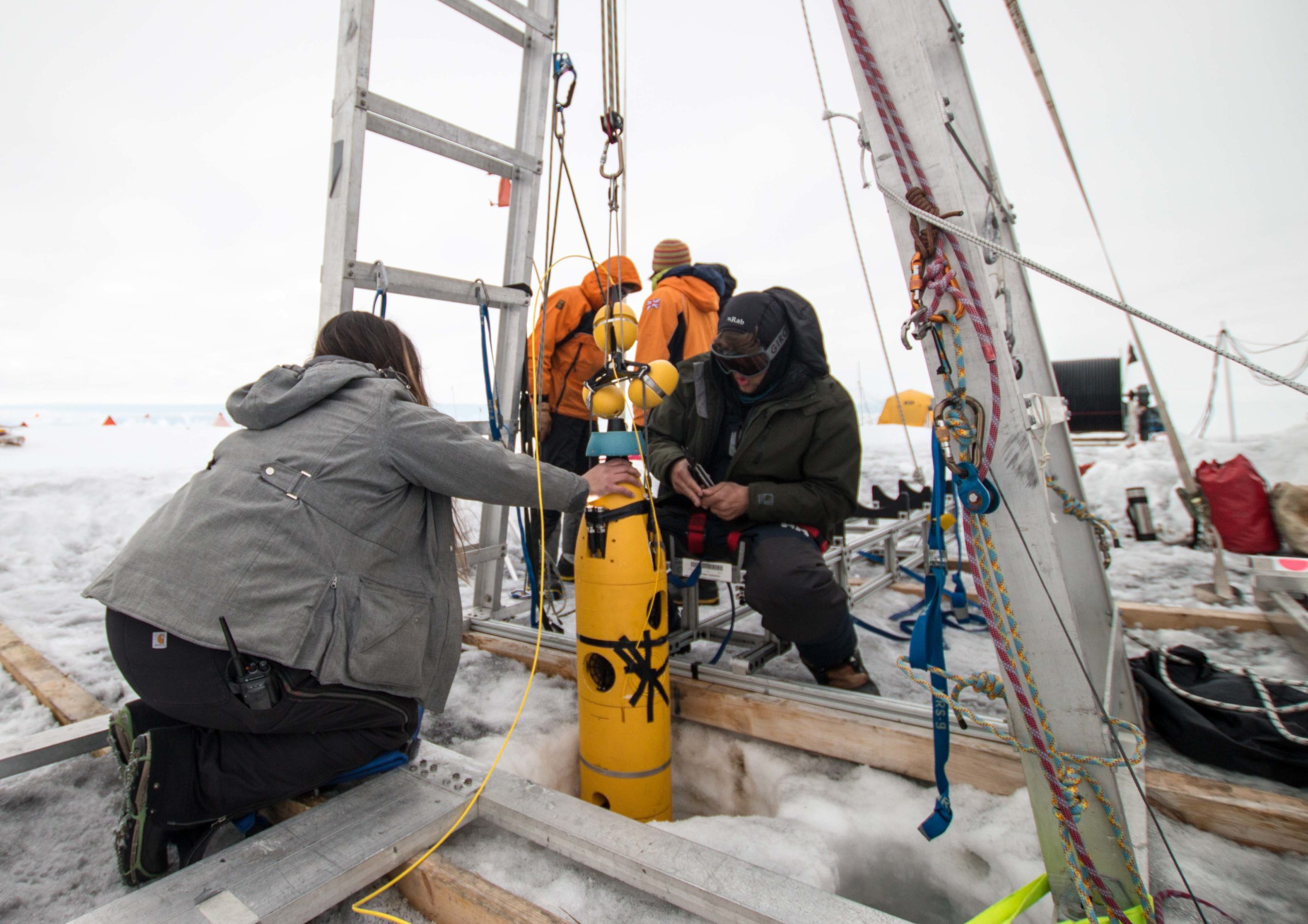
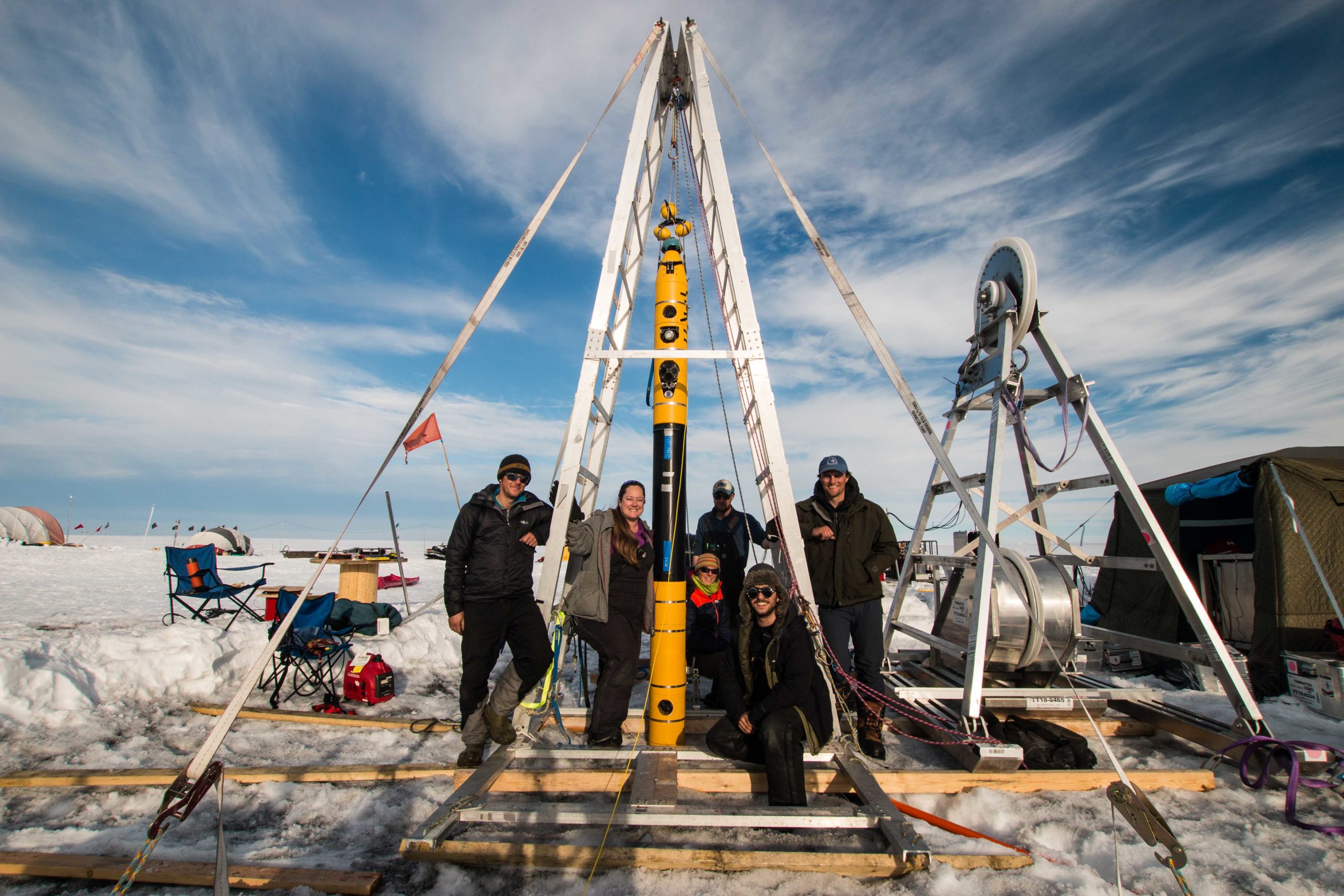
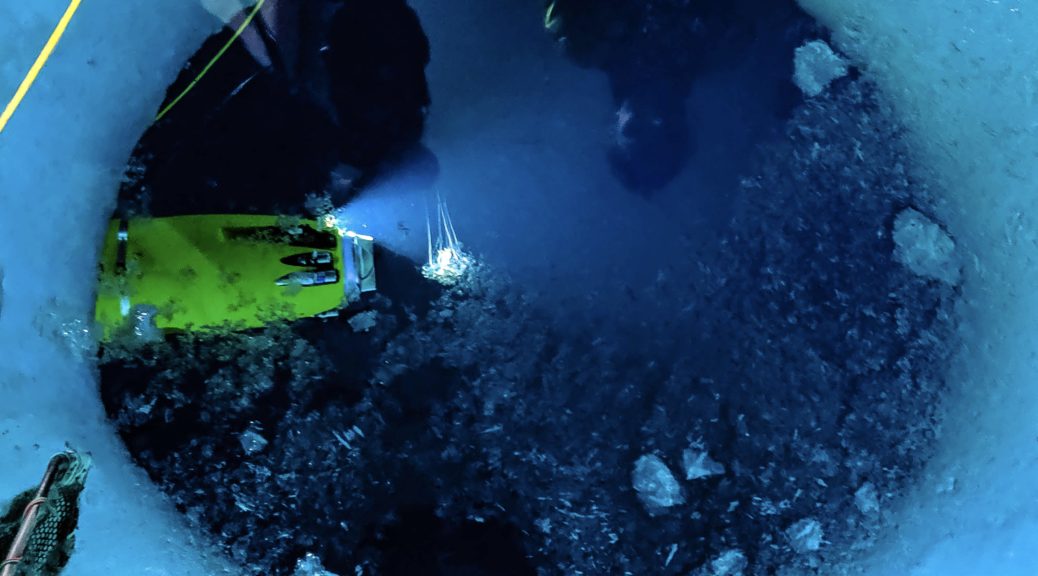
Dr. Schmidt: With MELT, we’re getting up close and personal with the place where sea level rise starts for glaciers like Thwaites — the grounding zone. Icefin used a hot water drilled hole, [drilled] by British Antarctic Survey team Hot Water On Ice, to get under the 600m of ice and swim 2km back to where the glacier starts to float on the ocean (the grounding zone).
Bulletin Atomic: Is the Antarctic melting? All of it? And how do we know?
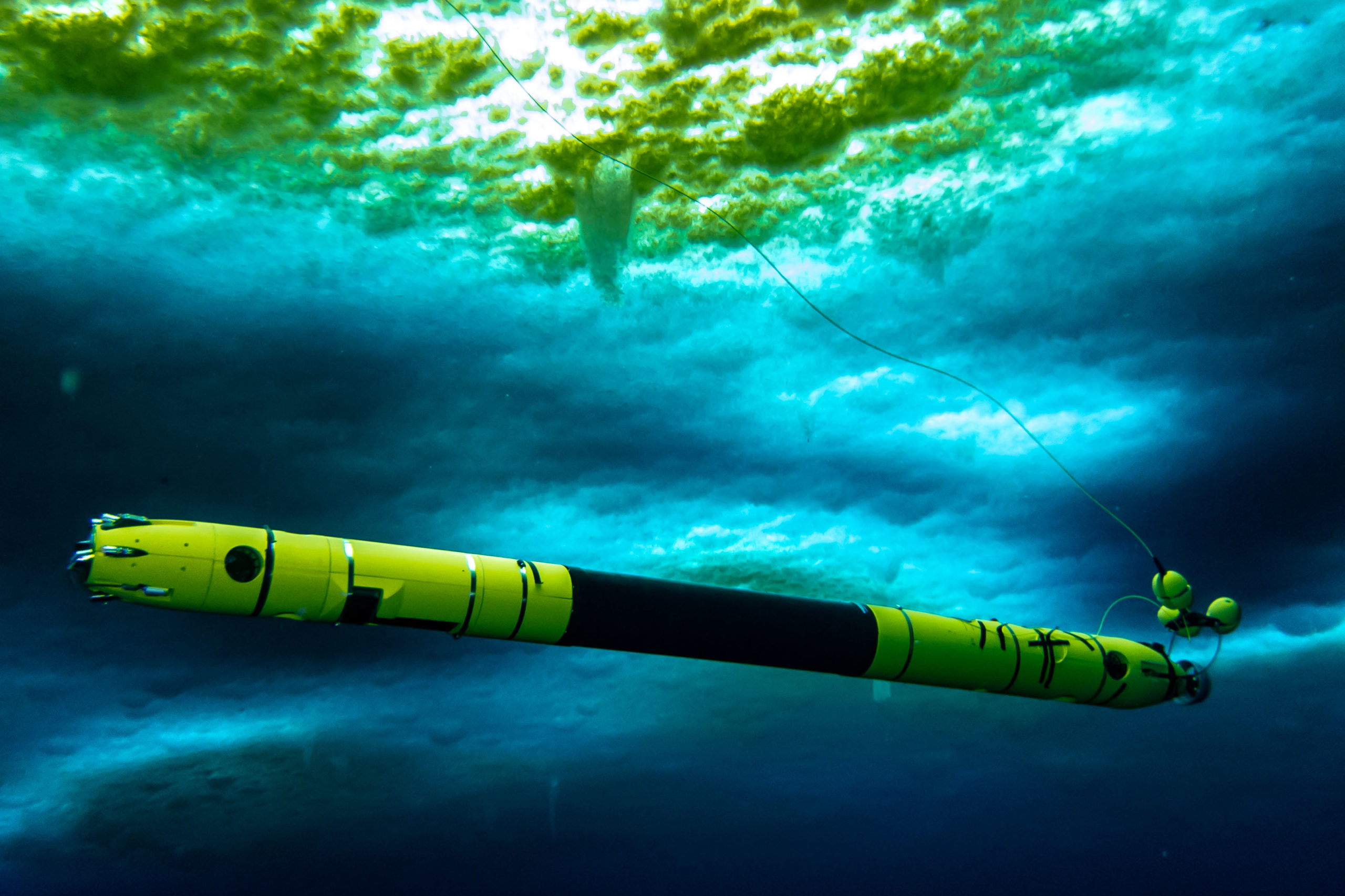
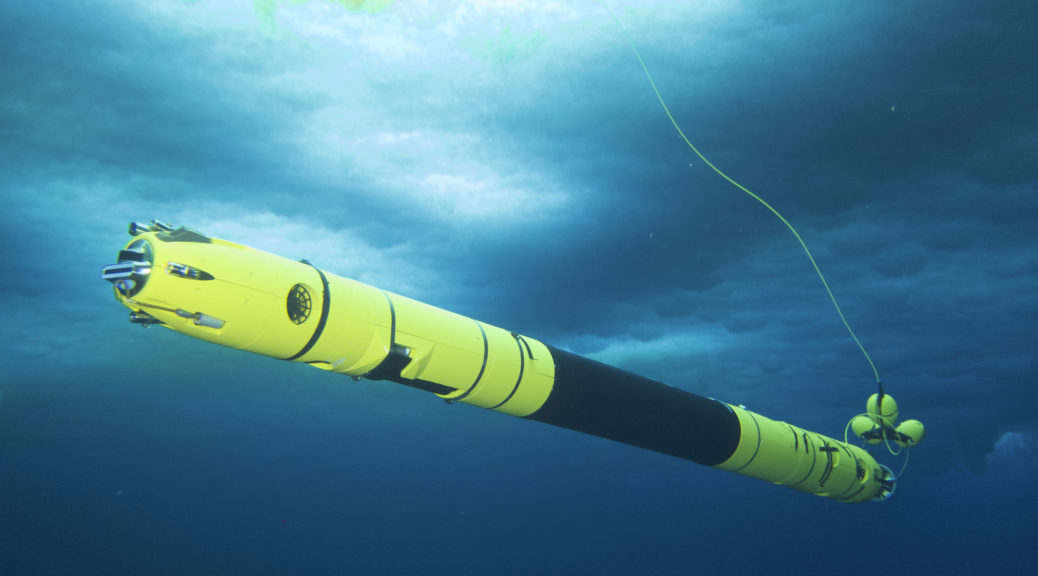
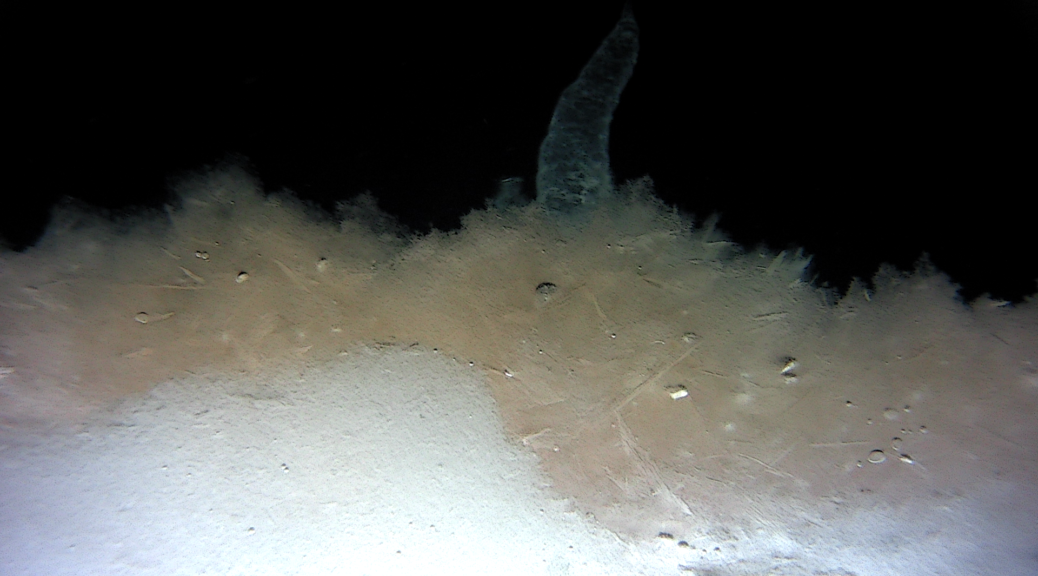
Dr. Schmidt: Quite a lot of melt is happening. We got to see it happening every time we went under the ice at Thwaites Glacier, a lot of which you can see in this video from Icefin here. Here’s our favorite image Icefin took of the grounding zone from under Thwaites, but there are lots more here

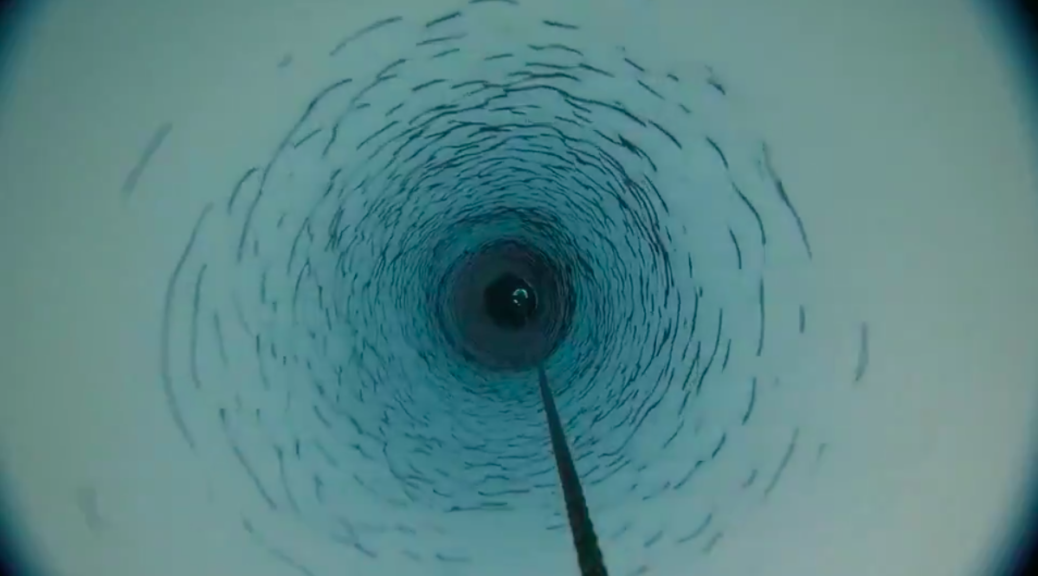
Bulletin Atomic: We’re tweeting an image from Peter Davis’ trip of the first borehole that was drilled. What are we looking at, and what does it tell your team? (Image credit: Screenshot of borehole trip video from Peter Davis, available here, as seen below)

Dr. Schmidt: Icefin went down this 600m hole 5 times, drove about 15km total, and mapped the base of the ice, tasted the water, and measured melting — plus we found some cool organisms! When we got this video back from the Hot Water On Ice team, we knew it was safe to put Icefin and the other science instruments through the hole to start science.
Bulletin Atomic: Are there instruments left in place at Thwaites Glacier? Are you getting real-time readouts or does someone have to go back to collect the instruments and data?
Dr. Schmidt: Lots of the teams have left instruments to measure change and monitor conditions on Thwaites Glacier over the next few years. MELT has GPS stations and tilt meters and ApRes that Hot Water On Ice and glaciologist Kiya Riverman and others will be working with, and a team will go back out to retrieve the instruments. The Icefin team is back remote-sciencing at the Georgia Tech College of Sciences and Georgia Tech School of Earth and Atmospheric Sciences, working on all the data from last year. Looking forward to getting papers out soon!
Bulletin Atomic: What will the melting of Thwaites Glacier and other parts of the Antarctic mean for sea level rise? How long will it take, and how high will it go
Dr. Schmidt: Thwaites Glacier is in a precarious position, like the Atlas of West Antarctica, holding back a deep basin of ice that supports the whole ice sheet. If Thwaites Glacier goes, there will be much faster loss of ice and sea level rise. We don’t know exactly how fast Thwaites Glacier is responding to climate change, which is why the National Science Foundation and Natural Environment Research Council put together the International Thwaites Glacier Collaboration, because we have to find out.
Bulletin Atomic: What stands out about working in such a remote area? As the technology improves, how will it help future researchers study the glacier?
Dr. Schmidt: Working on Thwaites Glacier was incredibly humbling and exciting. Antarctica is one of the few places that just knocks you back off your feet when you see it. Technology is definitely improving, helping us see new things, but the people doing the work mean even more. Science is a human endeavor, and a moral imperative. But sometimes you do get to drive robots under the ice, which is pretty cool.
From our perspective, using technology that NASA funded us to build to one day get to Europa, has helped us see our own planet in new ways. Icefin lets us see, “taste”, and “touch” the processes as they happen, swimming the instruments right up to where the action is, which is a new way to understand the ocean and the ice. And it’s pretty cool, because we can add those measurements over a mile away from the bore hole to seismic data from Kiya Riverman and ocean and radar data from Hot Water On Ice, and we get a new picture of how melting at the ice base is happening. Then you add together the work being done by MELT to the science from THOR, TARSAN, GHOST, DOMINOS, GHC, TIME and PROPHET and the whole Thwaites Glacier team can help us really know what’s happening now and what will happen next.