Based in McMurdo Station, Antarctica for the first part of their 2019 field season, the team on Project RISE UP is using its underwater oceanographer robot Icefin to study environmental and biological factors that influence habitability in oceans beneath ice.
Project RISE UP, an acronym which stands for “Ross Ice Shelf and Europa Underwater Probe”, is using Icefin to explore ice-ocean environments and the limits of life here on Earth, in order to help develop techniques that might be used for future exploration of ice-ocean ecosystems.
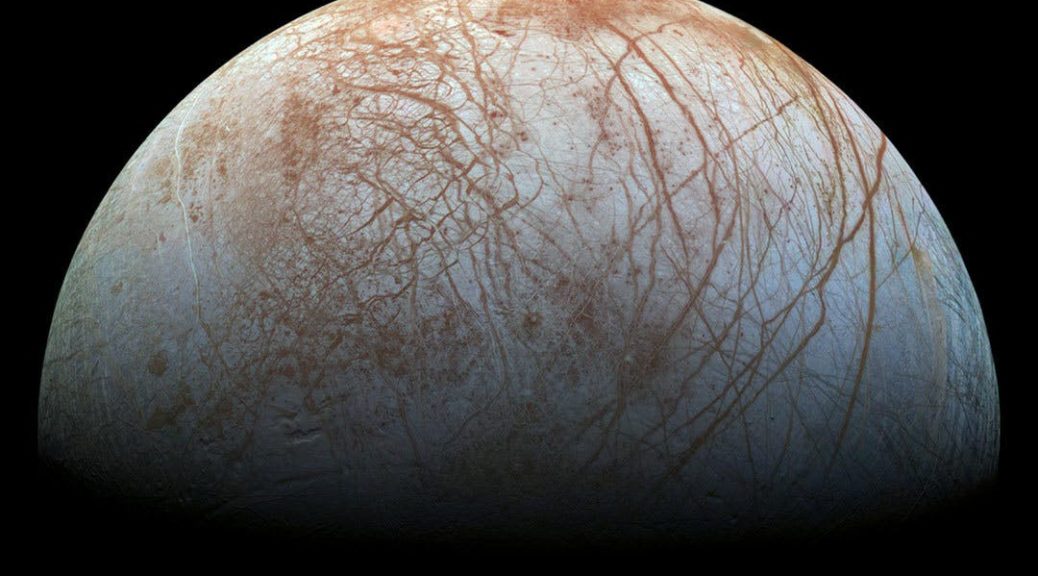
NASA confirmed in 2019 that Europa, one of Jupiter’s moons, had plumes of water vapor above its surface, which scientists had long expected from the ice-covered world. In addition, using observations from ground-based telescopes, “scientists have found strong evidence that beneath the ice crust is an ocean of liquid water or slushy ice,” according to NASA. These and other factors make Europa a prime subject in the search for other habitable worlds in our solar system.
Georgia Tech graduate student and member of the RISE UP team in Antarctica, Justin Lawrence‘s thesis is a major driver of work being done in the 2019 field season. He said the science and technology being developed through RISE UP could be used in the future exploration of icy worlds in our solar system, such as Europa.
“For my thesis, I’m mapping biological water mass properties including cellular abundance and microbial diversity with physical water properties such as temperature, salinity, and dissolved oxygen,” Lawrence said. “When combined, these variables help us understand how nutrient and carbon inputs from the open ocean and melting ice influence habitability below ice.”
In other words, studying biological and environmental factors that influence life in ice-ocean ecosystems here on Earth, will help scientists understand habitability in ice-covered oceans elsewhere.
“Earth is not the only body in our solar system with a liquid, salty ocean, and other ocean worlds such as Jupiter’s moon Europa might prove habitable to novel forms of life,” Lawrence explained. “To better understand how ecosystems under ice could work on other planets, we are developing hardware (Icefin), software, and scientific methods to first understand the interactions between life and ice in Antarctica.”
The diagram above depicts the unique circulation patterns that result from atmospheric cooling of the surface ocean, sea ice formation, ocean currents, and ice shelf melting to distribute nutrients below Ross Ice Shelf. The Ross Ice Shelf, located in Antarctica, is a floating mass of ice the size of Spain, which gets up to nearly 1 kilometer thick.
In addition to research being conducted at McMurdo Station in the 2019 field season, RISE UP will also fly with Icefin to the Ross Ice Shelf grounding zone, in collaboration with New Zealand’s Ross Ice Shelf Programme, where they will deploy Icefin along with other oceanographic sensors through a 35 cm wide, 700 m deep hole in the ice to explore the ocean below (as shown in the diagram above).
Happy November!! We’ve just completed one month on ice, officially week four of operations. C444/B041 has been up and running with science dives at last! To be clear—we use every dive to improve our understanding of the environment under the ice, but our “science” dives are those that occur at a site of interest with a fully functional and checked out vehicle, prioritizing science as the main driver for the mission. Especially because we are preparing for deep field missions supporting NASA, NSF, BAS/NERC and ANZ science, we also are conducting operational tests and field team training during each of these dives. All in all, we are meeting our science, operations, engineering, and training goals.
Figure 1: Icefin team dive documentation.
We keep a careful record of our process each dive through a system of checklists, check ins and check outs, and documentation. The Icefin team begins each dive by filling out a dive card that logs important information about the mission plan, instrumentation and vehicle status, location, and roles of the team. Dive notes are also taken both on the dive log through the topside computer for elements of the dive such as science readings, vehicle status, image annotation, etc, and by hand to record key events for later perusal and post dive meetings. Cards and notes are all kept by participants and a copy is archived for future reference.
Figure 2: Iced-fin after a dive. The vehicle doesn’t ice up, but the water dripping off at the surface will occasionally make fun Icefincicles.
We conducted three science dives on Tuesday 11/5, Thursday 11/7, and Saturday 11/9 of last week. During the first dive, we tested our drop weight solution as well as vehicle mobility after a a vehicle “cast” to the sea floor (what we refer to a straight downward or upward mission element through the water column to gather oceanography data to reference to our RBR CTD). We will be diving in areas where sediment cores will be taken, so we have been tuning our ability to translate away from the borehole to release the drop weight in an area that won’t disrupt the coring. We also worked in all three dives on tuning our vehicle magnetic and inertial navigation solutions to guarantee we have a streamlined manner of referencing position and heading under the ice. Finally, we continue to be able to retrieve the vehicle through 35 cm drill holes without the assistance of thrusters, which is needed for the deep field. The new aft “backup cam” has proven most useful for understanding vehicle state, especially during deployment and retrieval.
For all three dives, we have been operating out of fish hut 01, just adjacent to the ice shelf and about 500m North of the East-West-running rift in the ice shelf. Here, we are able to study several elements. Rift formation and evolution has been studied via remote sensing, seismic and GPR studies, but not much from below. Icefin allows us to map the structure of the bottom of the rift to get at these questions. Simultaneously, we can map the water column under deep ice, which has different oceanographic conditions and history from that under the sea ice. Right at the rift, there also may be two unique inputs to the water column: brine rejection from marine ice formation inside the opening rift, and surface melt water connecting down through the cracks in the ice. The combined mechanical and oceanographic questions about rift evolution are relevant topics for both Earth and Planetary Science, trying to understand how ice shells of all varieties operate and impact the oceans below.
Figure 3: Partial Icefin tracks from Dives 5 & 6 plotted on top of our planning map. We’ve been operating at Site B and will be moving to Site C next week.
On Tuesday, we completed season dive 4, ICE03 dive 11. The mission included the drop weight and heading tests, followed by a 500m drive out to the rift, then profiled across the 40m wide feature with the sonar and upward camera, and proceeded about 50m past the rift. There we descended to 50m depth below the shelf and back up to create a cast of the upper water column. We continued on from there, crossing the rift and ice shelf again, and then decided to poke around back up the rift this time very close to the ice to view with cameras as well as get the CT and DO sensors right into the boundary layer under the platelets. All in all, we spent 5.5 hours under water.
Figure 4: Fiber team foreman Andy Mullen monitors the tether down to Icefin during a dive.
On Thursday, we completed dive 5, which was a missing involving underwater heading tests followed by a long drive along the rift. We were also working on the use of waypoint following, tuning Icefin’s ability to autonomously hold position and travel along paths and between waypoints, which was a good test of the vehicle navigation. The mission included a 150 m cast, followed by a 500m drive to the rift, after which we drove along the rift pitched up slightly to keep the rift structure in the forward-looking sonar (Oculus). We followed the rift for over 1000m, completed a cast to 50m, and then viewed the ice. We were also joined via helicopter by the CEO of ANZ, Sarah Williamson and an ANZ team. They timed arrival perfectly, so we had the great opportunity to show them Icefin operations and live feed from the rift. We successfully recovered the vehicle after ~6 hours of operation.
Figure 5: Boop! A visitor in mission control.
On Saturday, we completed dive #6, which was a resounding success. We’ve been proud of our ability to quickly scale up from vehicle commissioning activities to testing and operations and finally science, but our real mark of success is a “perfect dive” where all parts of the operation from packing to retrieving the vehicle go smoothly. No dive is ever perfect really, there are always challenges during the dives, but the team’s ability to anticipate and adjust to the circumstances is key to ideal operations, and as of Dive 6 the Thwaites team who have been primarily operating ICE03 are in good spirits looking towards the deep field. Of course, the highlight was the science. After completing a set of tests of the heading above the ice, we deployed the vehicle for a 150m cast and a brief heading and tuning check. We then drove back out to the starting point of Dive 5, and this time turned East and traversed the rift over 1000m to the East of the starting point. The vehicle and team operated smoothly for the whole dive, communicating back and forth from mission control inside the hut to the tether team outside. At the end of the long survey, we completed a cast down to 130m, during which we profiled from the supercooled layer down through the ice shelf water, and encountering what we joked was a “shrimp-ocline” from 80 to 110 meters, in a region we’ve not usually seen so much activity. After completing the cast, we surveyed the rift up close, and then retrieved the vehicle after ~5 hours under water.
Figure 6: Left: Icefin Dive 6 vehicle position (colored line, colorized by depth) showing the 150m cast at the beginning of the dive (at plot origin, left corner), traverse out to and along the rift (ice base black, interpolated ice surface gray), and 120m cast at the far edge of the rift. Right: Raw (uncorrected) temperature and salinity values during the dive, colorized by depth for referencing to position.
Figure 7: Peter, Andy and Enrica complete a heading & mag “spin test” before deploying the vehicle.
Figure 8: View of the vehicle position, heading and snapshots of critical data streams from the base station computer (left screen) and sonar image of the rift (right screen). The rift is the long linear lines, where the brightness is increased reflection off the sides of the rift and the rough ice in the middle is fractured and rifted shelf ice filled in with marine ice and platelets.
All in all, the last week was a huge success. During the week, we’ve completed over 3000m of surveys of the rift and shelf, collected multiple CTD casts and water samples to complement the vehicle sensors. We’ve collected over 16 hours of under ice data. The plan for the next week is to repeat similar science dives and tests with the ICE02 vehicle that’s heading to Kamb Ice Stream with ANZ. We’ll be moving into true mobile operations, working out of a tent at Site C for two of the dives, and then keeping an eye on completing our missions the following week at Site A. We’ll also be joined by our BAS and US colleagues from the Thwaites Melt project, and starting to pack up for the two deep field campaigns. Have a lovely week out there!
Figure 9: Sara Williamson and team tour mission control.
Figure 10: A local visitor departs camp.
This year the field team for Icefin consists of:
Britney Schmidt, Matt Meister, Dan Dichek, Anthony Spears, Justin Lawrence, Ben Hurwitz, Andy Mullen, Peter Washam, and Enrica Quartini.
Greetings all! Week three was packed with excitement for the Icefin team (C444/B041). Most excitingly, we officially became a two-robot field team, with both Icefins successfully completing dives. The week began with the Icefin base camp set up, situated on the sea ice ~ 8 km out across from McMurdo near where the sea ice meets the McMurdo Ice shelf, the “ice-shelf transition,” followed by performing two vehicle dives and collecting CTD data and water samples, and ended with the team enjoying costumes and music at the McMurdo Halloween party!
Figure 1: The Galley helped us all get in the spirit of Halloween.
On Tuesday, part of the team went out to assist McMurdo Fleet Ops as they installed our fish hut and drilled the fish hut dive hole. The team rolled up their sleeves and shoveled plated ice relentlessly as waves of ice and water flooded the sea ice surface when the drill reached the ocean. It was quite an epic experience for the new members of our team who had never experienced the raw power of the Reedrill or set up fish hut ops before. Meanwhile, the rest of the team stayed at the lab to ballast and trim our second vehicle, ICE02, in the aquarium tank, repeating the procedure used for ICE03.
Figure 2: Britney and Ben assemble Icefin under the LARS.
On Wednesday we proceeded to our second dive of the season, with the goal to finalize the ICE02 ballast and trim at the Jetty Fish Hut (FH19), which once again went really smoothly. This time, the B041 team manned the controls on Icefin. During the dive, so much progress was made that we were also able to execute several “plus up” goals for the dive, engineering system tests that included magnetic heading and controls tests. We also had the chance to set up and inspect our Launch and Recovery System (LARS). To cap off the day, on Wednesday night, Peter gave a science talk at the Crary Library titled: “Switching Poles: Atmosphere-Ice-Ocean Interactions beneath one of Greenland’s last remaining ice shelves”. He had a full audience and did a fantastic job of describing his past work on Petermann Gletscher.
Figure 3: First CTD data of the season.
Friday we took ICE03 on its second dive (third of the season), this time using a LARS deployment. To complete the dive, the team used the newly installed the LARS outside of FH19, where Mission Control operated. The dive was a great success, which was constructed from 5 elements: heading tests above and below the water, 100 m and 500 m tracks out under the ice both to calibrate the current profiler (ADCP) and test data collection for the new bathymetric sonar (the Norbit), and waypoint following and station keeping tests, as well as vehicle retrieval tests. We gathered some very helpful data on the vehicle systems as well, and identified some refinements to improve control. All in all, the dive was a win, especially with the great views of the brinicles coming through the sea ice, and visit from a suspicious mammal.
Figure 4: Dan drives ICE03 under the sea ice. At left are the feeds from the four cameras on the robot (fore top & bottom, aft, and up/down HD), and on the right screen are the driving controls, a heading dial, depth, pitch and altitude values, the map view of the mission (center of the screen), and switches for vehicle systems during the dive.
Figure 5: Spying Weddell seal. No, we totally don’t see you there, bro.
Figure 6: The team lifts Icefin on the LARS for the first time this season.
One of the big changes for the team this year has been the use of a customized jiffy drill attachment to bore a 14” hole in the ice, the same size as the dive holes we expect to use at the grounding zones of Kamb and Thwaites Ice Stream. It’s not a casual or comforting experience dangling your research program through a small hole in the ice. Luckily, the team has worked hard to try to design the best possible approach to the problem, which is what allows Icefin to complete its unique tasks at locations far from the edge of the ice. Icefin is ~9.5 inches (24cm) wide, so the 14” (~35cm) hole is a good model for the deep field. Moving to the drill attachment has also let us reduce the amount of fuel and time that it takes to prep for deployment, replacing a melting process using the “hotsy” with the new drill attachment. We completed several tests, adjusting the position of the vehicle “bridle” that helps right it under the water so that it is retrieved smoothly through the narrow hole. We conducted three “dead robot” tests, where we stop the robot in a difficult position under the ice away from the retrieval hole, and then “play dead” while the team retrieves it using only the tether. All tests were successful, which was exciting news for the team! We’ll continue to test and certify the solution over the next few weeks. We finished the week off by prepping the vehicle and gear for the move to operations out at our main Icefin site this coming week. Stay tuned!
Figure 7: View of a brinicle and platelet ice growing underneath the sea ice from the ICE03 forward camera.
This year the field team for Icefin consists of:
Britney Schmidt, Matt Meister, Dan Dichek, Anthony Spears, Justin Lawrence, Ben Hurwitz, Andy Mullen, Peter Washam, and Enrica Quartini.