I stayed awake for a majority of the 6 hour overnight flight from Baltimore, Maryland to Pituffik Space Base, anxious for the moment I would get to see the Arctic and Greenland Ice Sheet for the first time. Around 4 hours in, the moment came and we were greeted with ice filled-fjords and fractured sea ice out the window. However, one of the coolest things on that flight was seeing the sun rise at 06:42, only to for it to not fully clear the horizon before setting again as we continued north. The sun would not rise in Pituffik until 08:48 that morning.
A brief sunrise over sea ice fractures from the plane.
The base is exactly how I would imagine an Arctic research station would look, full of old metal buildings with small windows and thick doors. The base is surrounded by mountains to the north and south, the ocean to the west, and the edge of the Greenland Ice Sheet to the east. Arctic foxes can be seen all over, and although they are extremely cute, they are also full of mischief (for us this means chewing on our sleds and snow mobiles).
A fox waiting outside our front door
The Arctic gave us a ‘warm’ welcome our first night by putting on a beautiful show with the Aurora Borealis! We thought we might be a little too far north to see them, but nonetheless they were quite bright and directly overhead.
Our first several days were largely made up of unpacking and setting things up, although we did have a couple hours to take a field trip up the North Mountains, and this was where we saw Wolstenholme Fjord for the first time. The views were incredible, especially since the sun was starting to go down. After 5 days of prep, we were nearly ready to go and spent the morning doing sea ice training. I was fascinated by how dynamic the ice was and all the different cracks and features. I learned how to measure ice thickness (it was exactly 1 meter where we were), how to drill V-threads (which we use to anchor tents and other things around camp), and how to use the jiffy drill (which is how we create the boreholes to deploy Icefin and do CTD casts). The next day, the full group boarded our snowmobiles and went to our first field site to get set up. The trip was absolutely beautiful, with several large icebergs frozen into the sea ice. I couldn’t believe how blue some of them were! After we arrived, Peter and I did a CTD cast, marking our first bit of oceanographic data. After a day and a half of set up (there were a couple of small hiccups), we had our first Icefin dive! It was super exciting to get to see the data come back in real-time and know that it was all brand-new. Even though the first dive was more basic and straightforward than some of the ones we’d be doing later, the data ended up being really interesting!
We’ve now gotten in the swing of things and over the past weeks we’ve done several more Icefin dives and CTD casts. I even got to do my first solo cast, and although the process is not too complicated, it’s still an oceanographer’s milestone. I also got my “Icefin Learner’s Permit” and drove the vehicle for a few minutes!
My favorite moment so far was my first time driving up to Rasmussen Glacier. Until that day, I’d only ever seen one (mountain) glacier up close, and that was before I started doing research involving them. Every single day for the past several years, I have thought about glaciers and/or the ocean surrounding them and their dynamics. I’d seen countless photos, diagrams, maps, plots, and calculations, and yet during the first approach it still somehow looked nothing like I imagined, and I was struck by how much power seemed to radiate from the tall, jagged wall of ice.
We have 3 weeks left now, and there is still much to look forward to. Our next stop is Moltke Glacier, which is the largest of the three and full of melange in front, which should be incredibly beautiful and scientifically interesting. Stay frosty! (I’m not having any trouble with that)
Greetings from the Top of the World! I’m Jorge Coppin-Massanet, a PhD student with the Cornell/NASA SSHOW UP team. My research focuses on developing advanced instrumentation for exploring icy environments—both here on Earth and potentially on other worlds. With this being my first Arctic field season, I am writing this blog to capture my thoughts about it. I’m excited to share my experiences and discoveries from our thrilling expedition!
Me with the Ultima Thule sign! Beautiful Mt Dundas in the background!
After nearly a year of planning, poring over research papers, and extensive logistical prep, I finally SSHOWed UP in Greenland, and it has exceeded all my expectations! Arriving at Pituffik Space Base, situated 1,210 km (750 mi) north of the Arctic Circle and just 1,524 km (947 mi) from the North Pole, the reality of fieldwork struck me immediately upon glimpsing the awe-inspiring Arctic landscapes during our AMC flight landing early Friday morning.
First views of Greenland out the window as I woke up on the flight.
Sunrise over the horizon as we were near landing.
Our journey included a brief but productive stop in Baltimore, where we refined our field plans, clarified team goals, and completed critical safety training. Once settled at Pituffik, we swiftly located our dormitories, unpacked equipment shipped months earlier, and dove straight into preparations. Our initial days involved navigating logistics, setting up essential gear, and acclimating to our new environment. On our very first night, we were treated to an unexpected and spectacular aurora—a promising omen for our mission ahead.
Surprise Aurora on night #1 in Pituffik!
I quickly became proficient at piloting snowmobiles across sea ice—an exhilarating skill I never anticipated mastering, especially having spent my entire life in the Caribbean. The fieldwork has allowed me to learn numerous new skills and refine previous ones. Sea ice safety training refreshed my knowledge of first aid and search-and-rescue techniques, while setting up field camps brought back memories of knot-tying from my Boy Scout days. Moreover, I gained a profound appreciation for the complex logistics behind polar exploration.
Sea ice safety! Learning how to tie v-threads.
Stop on our way back from the ice! We were all looking at a Seal!
The aforementioned seal!
Life at Pituffik Space Base has been even more vibrant than anticipated. The community here has warmly welcomed our team, from hearty meals at Dundas Hall to lively karaoke nights at the appropriately named “Top of the World Club.” Our enthusiastic performance of “Pink Pony Club” by Chappell Roan might not win any vocal awards, but we definitely scored high on team spirit! Also, the curious Arctic foxes occasionally greeting us outside our dorms have been a delightful addition to our days.
Very comfy accomodations at Pituffik!
View of base from North Mountain while out scouting the fjord!
View of base from the south on way up back from sea ice transition!
Just one of maybe a thousand pictures on my phone of the foxes!
Beyond daily logistics and enjoyable base activities, we’ve already achieved significant scientific milestones. In just two weeks, we completed our first three Icefin dives at sites WF1 and WF2. During these dives, we successfully mapped nearly 8 kilometers of underwater terrain, gathering valuable oceanographic data—including temperature, salinity, oxygen levels, current speeds, and detailed sonar and HD camera imagery of Wolstenholme Fjord. Our second dive set a new Icefin mission record, covering almost 5 kilometers, and marked my first experience piloting Icefin. By the end of our third dive, we completed a transect across the fjord, setting the stage for upcoming explorations at the fjord’s marine-terminating glaciers.
WF1 field camp set-up!
Icefin Recovery after first dive!
Sunset on WF1.
Some Icefin piloting!
Sunset on WF2.
Looking ahead, I’m eager to continue our exciting work, getting up close to glacier fronts, deploying my own instrument—SUIMS—for its first field tests, and further investigating the intriguing dynamics of subglacial plume outflows.
Panoramic image of WF2 field site and Wolstenholme Fjord!
Flag of Puerto Rico planted at The Top of the World!
Pingo STARR is a NASA-funded program exploring ice-cored hills in the Arctic Tundra called pingos. These hills form from freezing ground water, forming a massive ice mound at the center and uplifting the permafrost. Not only are they found on Earth, but there is strong evidence that they also form on Mars and on the largest body in the asteroid belt and innermost Dwarf Planet, Ceres.
Similar physical processes may also be happening on the icy satellites. Partially because of their remote locations, little is really known about pingos even on Earth. Pingo STARR aims to change that. We’re working with a host of cutting-edge geophysical techniques to perform the most in-depth analysis of these features ever attempted here on Earth in an effort to also understand how they may be forming on other planets. What’s more – we’re assessing the kinds of techniques that both robotic missions and one day astronauts could use to detect and map water resources that could be vital for exploring Mars in particular.
This mid-season field work update from Ky Hughson and Britney Schmidt details the progress we made during our first two weeks in the field.
Percy pingo, the tallest pingo that we will survey in the 2021 season, with a human at the summit for scale.
Since arriving in Alaska, the Pingo STARR team has been hard at work exploring the tundra and collecting an amazing geophysical dataset of our favorite ice cored hills: pingos! Prudhoe Bay has proved itself a rugged yet welcoming outpost for us to base our science operation efforts out of, and the North Slope itself is an untamed landscape of exceptional beauty and occasionally extreme weather. Thus far our first season has been a challenging but fruitful endeavor.
Just getting to the field safely in a global pandemic was a challenge the team took seriously: for months, we re-evaluated how to meet our science goals within the very real logistical constraints presented by trying to keep the team safe amid health concerns on top of the usual challenges of polar field work–wind, cold, and remote operations. Luckily, the Arctic Oilfield Hotel, our host camp here in Prudhoe Bay has taken health concerns for its staff and guests very seriously, with mandatory masks and social distancing maintained everywhere, solo rooms, safety precautions in the dining hall, and frequent safety checks. Moreover, negative Covid-19 tests within 72 hours and a minimum 14-day temperature and symptom log are required to be presented in order to get into Deadhorse, and all of the camps are checking the cards regularly. With our team able to isolate prior to deployment, test regularly during that time and with most receiving a vaccine prior to the campaign, and with rigorous attention to safety while here, we’ve been able to minimize risks to the team.
Thank YOU! We would not be here collecting this amazing data without the help of many individuals both in Atlanta and in Alaska who have helped us. The Pingo STARR team would like to explicitly thank Frederick Trotter at Georgia Tech for all of his hard work getting insurance for the trip settled out. We thank Julie and Brent and the staff at Arctic Oilfield Hotel who have been indispensable to us, helping us figure out the smoothest operations plans and making the AOH our delicious home away from home. A special recognition to Julie for her smiles and months of help and flexibility with us as we got everything sorted! We would like to thank Jerry Lee at AER for his hard work getting the rentals sorted out, and Basil, Jesse, Chuck and the team at AER in Deadhorse for being so welcoming to the team. Thank you to NASA and the Astrobiology program, and especially our program manager Mary Voytek for the honor of working again with NASA. Finally, thank you to Belal, Laura, and Greg at Georgia Tech EAS who helped us get the season sorted, and especially to Matt Meister, Dan Dichek and Kathrine Udell for their help. This has been a memorable and productive season because of all of you!
Gear shakedown in the tent at AER (left) and cold weather gear review at AOH (right).
Britney Schmidt, Andy Mullen, and Roger Michaelides were the first Pingo STARR detachment to arrive in Prudhoe Bay on March 19, and were able to acquire our rental equipment, start prepping sleds and equipment for operations, and complete initial test drives down the Dalton Highway in order to select safe pull outs as bases for our initial surveys. Kynan Hughson and Enrica Quartini arrived shortly after on March 22. Now with critical mass, the team spent much of the 22nd and the 23rd preparing the capacitively-coupled resistivity (CCR) meter and ground penetrating radar (GPR) for use on our first pingo, as well as packing our sleds and trusty steeds (i.e. snowmobiles).
Map & mission review at AOH (left) and Ohm Mapper test at AER (right).
The highlights of the first few days were getting acquainted with our equipment partners and hosts in Prudhoe Bay, preparing for cold conditions, engineering some unconventional ways to tow our science devices, and visiting our first pingo. In order to tow the CCR and GPR on our snowmobiles the team needed to modify the lids of some of our packing crates as well as strap our cargo sleds into a couple of different configurations affectionately known as “pontoon mode” and “super-banana mode”.
A view of our science tow sled in ‘pontoon’ mode being prepared to support the 50 MHz GPR antennas.
In these initial days we also carefully reviewed our safety plans and prepared ourselves for cold tundra conditions. On March 23 the team carefully went over all our procedures and showed off our cold weather gear in a safety review “show-and-tell”.
On March 24 we embarked on our first pingo excursion from our operating zone at the Franklin Bluffs, roughly 60 km south of Prudhoe Bay. During this mission we traveled ~7 km west from the Franklin Bluffs to recon the ~16 m tall mature pingo near there, as well as a smaller young pingo to its northwest. We made our temporary camp at the young pingo and successfully surveyed a transect across it. The wind was low and the temperature a balmy -17 Celsius, which was a welcome reprieve for our first day out doing science. Our early radar and resistivity data imply that this hill has an icy core as well as some internal ice wedges, confirming that it is indeed a pingo! The team is already excitedly reviewing these observations to better understand the watery and icy structure of this unique hill.
Team members discussing GPR data obtained over our first survey target affectionately referred to as Ringo (it presently does not have a recognized name).Ohm Mapper data implying a large, highly resistive, ice core underneath Ringo pingo (indicated by the purple colors corresponding to resistivity values similar to ice).
Beyond majestically rising from the tundra, pingos are important indicators of groundwater and permafrost properties, as well as bellweathers for how the frozen tundra is changing in a warming climate. They may also be present on the surfaces of other planets, marking oases for both endemic life and, hopefully, water resources for future explorers.
US geodetic survey marker on top of Percy pingo, the tallest pingo we will survey this season.
Since our first survey the team has completed surveys across 3 different pingos using three wavelengths of radar including a multi-offset technique, the Ohm Mapper that measures conductivity and resistivity of the materials, and have completed Transient Electromagnetic Surveys of two of the pingos. We have unfortunately also suffered (expected, but unfortunate) weather delays for several days by high arctic winds that, coupled with cold temperatures, made it unwise to work out in the exposed tundra.
Members of the survey team showing off the ‘super-banana’ mode configuration of our tow sled.
Our team was joined on March 29 by its final member, Matt Siegfried, and subsequently surveyed 2 large pingos about 30 miles south of Prudhoe Bay. While the topography was challenging, we were deftly able to navigate their crenulated summits with our snowmobiles and instruments in tow. The largest of these pingos, Percy, measures nearly 18 m tall, and was last surveyed by the US geodetic surveyed in 1955! Altogether, these surveys now represent a comprehensive and comparable geophysical dataset over a wide range of pingo shapes observed in the Alaskan Arctic.
Percy pingo, the tallest pingo that we will survey in the 2021 season, with a human at the summit for scale.
All in all, preparing and executing our 2021 field season has been quite the adventure and we’re extremely grateful to everyone on the field team and all those back down south who helped get us here. It goes without saying that 2020 and 2021 have been challenging times, but the opportunity to get out and do the work we’ve been preparing for for over a year has been an exhilarating experience.
Members enjoying the Northern Lights.
Finally, despite our hectic schedule the team also took some time to enjoy a Northern lights show, and have been thoroughly enjoying the regular appearance of sundogs and solar halos most days. There are definitely perks to working in the Arctic.
Pingo SubTerranean Aquifer Reconnaissance & Reconstruction (Pingo STARR) is a NASA- funded research & analysis program grant supported through the innovative Planetary Science and Technology for Analog Research (PSTAR) program. This program allows planetary scientists to conduct research on Earth that is forward thinking and explores our own planet in ways that address key planetary science questions, develop and/or use compelling technologies, and assess operations scenarios to inspire future planetary missions. Through these grants, our team has also been able to advance Earth science as well as synergize across NASA’s investments, and build towards a systems level understanding of planets as a whole. Our work has primarily focused on the polar regions, which have lessons important for environments across Mars, Europa and other moons, and even the asteroid belt.
Pingo STARR is a NASA-funded program exploring ice-cored hills in the Arctic Tundra called pingos. These hills form from freezing ground water, forming a massive ice mound at the center and uplifting the permafrost. Not only are they found on Earth, but there is strong evidence that they also form on Mars and on the largest body in the asteroid belt and innermost Dwarf Planet, Ceres. Similar physical processes may also be happening on the icy satellites. Partially because of their remote locations, little is really known about pingos even on Earth. Pingo STARR aims to change that. We’re working with a host of cutting-edge geophysical techniques to perform the most in-depth analysis of these features ever attempted here on Earth in an effort to also understand how they may be forming on other planets. What’s more–we’re assessing the kinds of techniques that both robotic missions and one day Astronauts could use to detect and map water resources that could be vital for exploring Mars in particular. Pingo STARR’s key objectives are to:
Use geophysical techniques such as ground penetrating radar (GPR), capacitively- coupled resistivity sounding (CCR), and transient electromagnetics (TEM) to determine the hydrological and geological structure of large pingos in the North American Arctic.
Assemble the largest comparable and complementary geophysical dataset of pingos collected to date to enable previously impossible analyses into periglacial hydrology.
Evaluate the advantages and disadvantages of various geophysical methods for discovering and investigating ground ice phenomena in a planetary analog environment.
Test the feasibility of deploying similar geophysical instrumentation on the surfaces of planets, moon, and asteroids in the future by both human and robotic explorers.
The Pingo STARR Team is:
PI: Dr. Britney Schmidt, Georgia Tech
Science PI: Dr. Kynan Hughson, Georgia Tech
CoIs: Dr. Matthew Siegfried, Dr. Andrei Swidinsky, Dr. John Bradford, CO School of Mines, Dr. Hanna Sizemore, Planetary Science Institute
Field Manager: Dr. Enrica Quartini, Georgia Tech
Field Team 2021: Dr. Roger Michaelides, CO School of Mines, Dr. Andrew Mullen, Georgia Tech
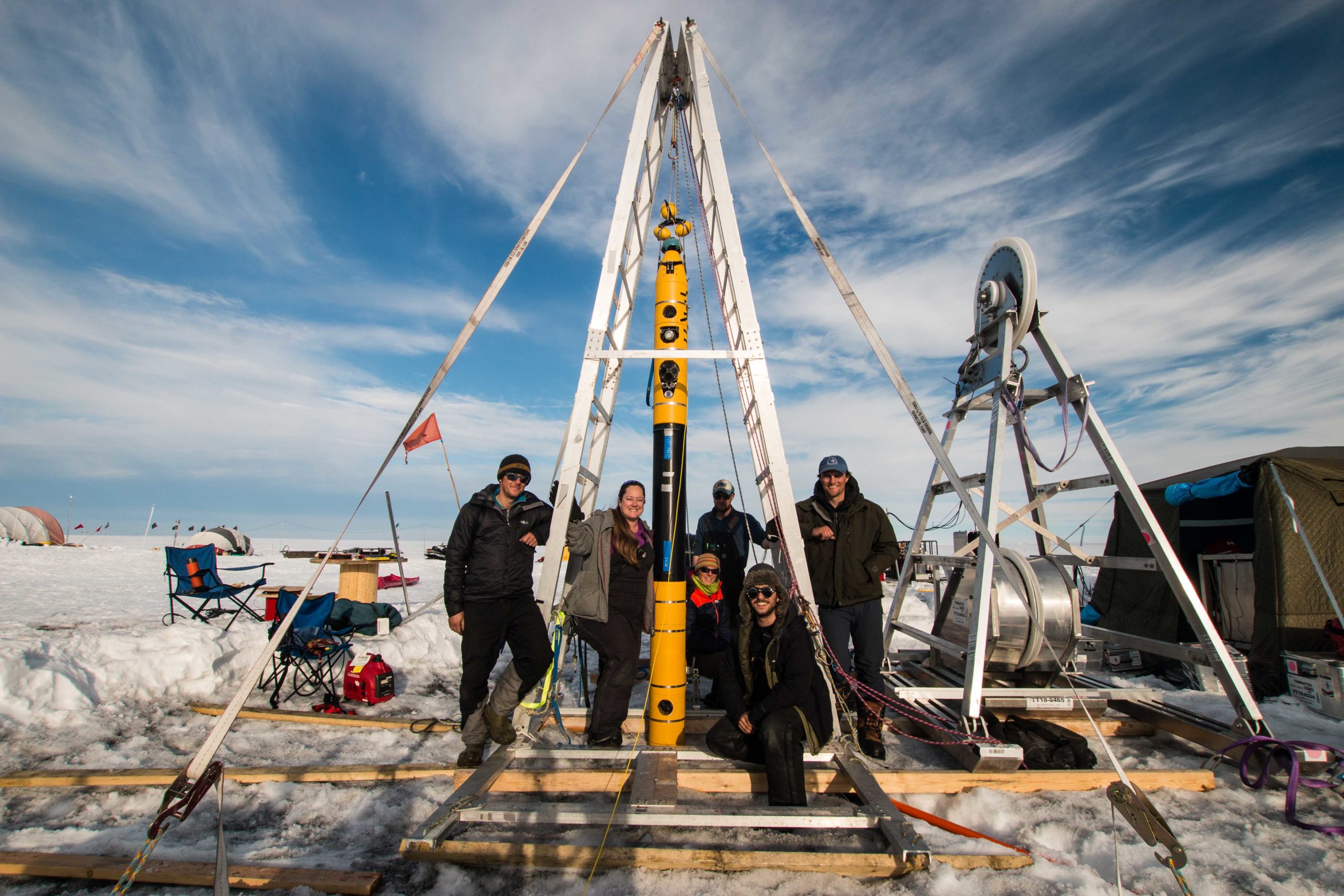
Curious about the scientific instruments Icefin has to help it do groundbreaking (and ice-breaking!) field work? From salinity and temperature readings, to seafloor imaging and sonar mapping, Icefin has a collection of instruments that help scientists look at all kinds of things under the ice.
Here, we’ll talk about Icefin’s Oculus sonar from Blueprint Subsea, which can be spotted on the nose of the vehicle in the video below, taken during a dive under sea ice near McMurdo Station in Antarctica.
Footage of Icefin under sea ice near McMurdo Station, Antarctica during the 2019-2020 field season. You can see Icefin’s blue Oculus sonar on the nose of the vehicle. Video was filmed by the Icefin team using a Trident ROV. Big thanks to Trident developer Eric Stackpole for getting us our Trident. Icefin work was supported by USAP, NSF, and NASA.
Both Icefin vehicles have Oculus MD750d sonars, including when they were deployed during the 2019-2020 field season (in McMurdo Sound, as well as at Thwaites Glacier and Kamb Ice Stream). The Oculus sonar used by Icefin is a compact model by Blueprint Subsea, which allows the vehicle to monitor long, narrow boreholes, and navigate beneath the ice in precarious locations, all while using the sonar to map interesting features on the ice and seafloor interfaces, including fractures, rifts, melting, and grounding zone environments.
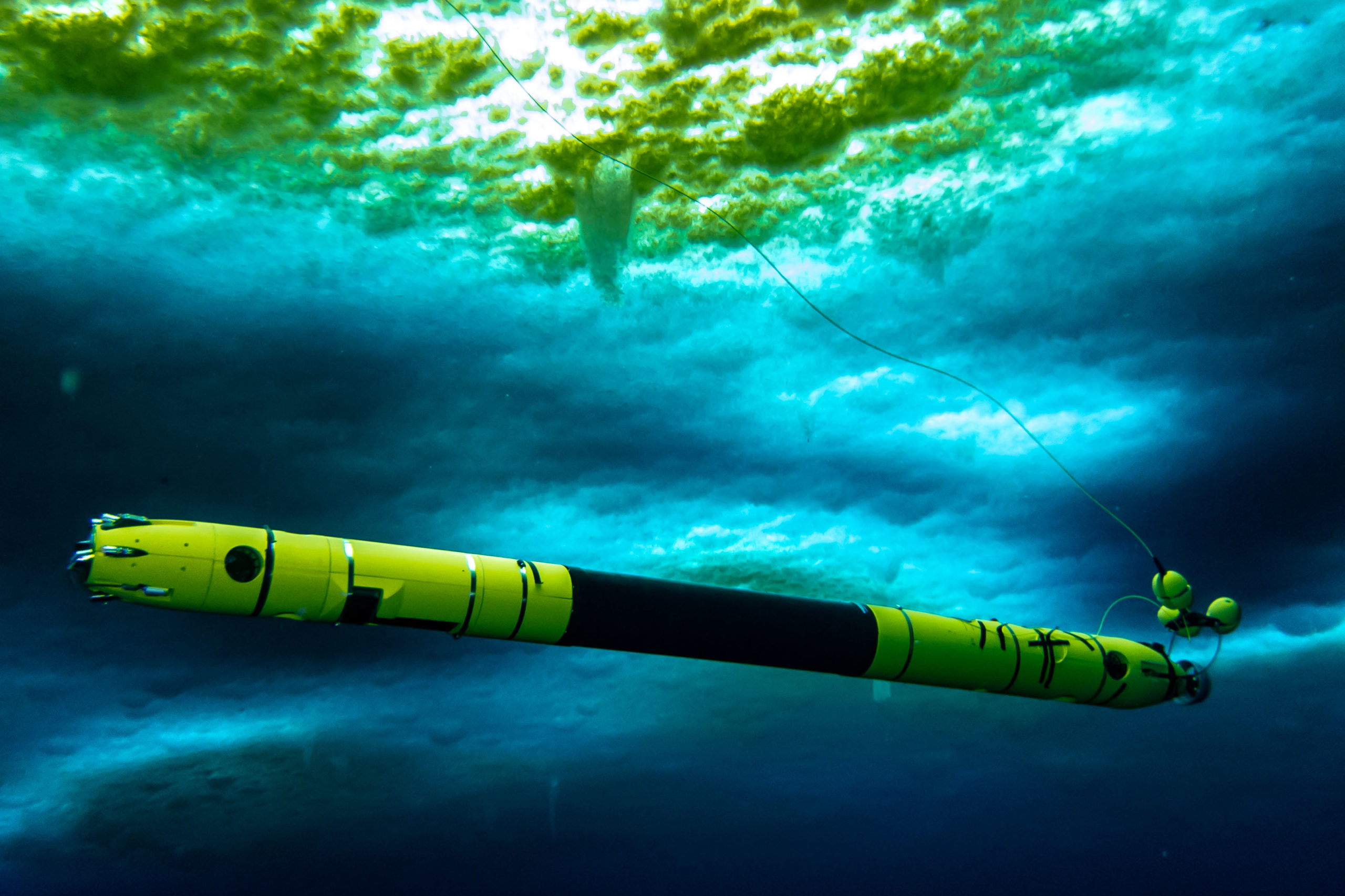
In the photo below, along with some icicles (which we call Icefin-icles, since they formed on Icefin), you can see a close-up of the Oculus sonar – it’s the blue and black oval-shaped device on the front of Icefin.
“The sonar was simple to integrate into our vehicle and gives us great situational awareness during our missions. The support from the Oculus team was also outstanding,” said Anthony Spears, Icefin Research Engineer. “The most outstanding experience we have had was when Blueprint was able to manufacture and deliver an Oculus sonar to us in the deep field in Antarctica in less than two weeks to ensure full data collection capabilities during a very important field season.”
The blue and black Oculus sonar from Blueprint Subsea is visible on the nose of this Icefin vehicle, which is also covered in icicles.
But before heading out to the deep field camps, the team also spent about a month in McMurdo Sound deploying Icefin through the sea ice and swimming out below McMurdo Ice Shelf from October-November 2019. It’s easier for the team to take a few weeks getting the vehicles ready for the deep field while in reach of the resources and relative comfort of McMurdo Station. Moreover, the unique ice-ocean processes and ice environments around the area are good planetary analogs. McMurdo Ice Shelf is a smaller shelf stemming from the extreme northwestern corner of Ross Ice Shelf. By drilling through the relatively thin sea ice right at the edge, the team was able to map the base of the ice shelf, without requiring the support of a large hot water drill like at Thwaites Glacier and the Kamb Ice Stream.
A test stitch of Oculus sonar data from a dive near McMurdo station shows the underside of the ice of the McMurdo Ice Shelf and rift system, which is part of the extreme northwestern corner of Ross Ice Shelf.
In the early part of the field season, the Icefin team focused on a 4 km long section of a rift in the ice shelf that is continually active, most recently beginning a calving period in 2016. This rift has been mapped using remote sensing and GPR data from surface surveys, but no ice shelf rift has ever been mapped in detail by an underwater vehicle (though there have been some under ice mapping studies with vehicles like Autosub). Rifts are long, wide active fractures in ice shelves that fill in with marine ice and refrozen melt water, creating an “ice bridge” between the two once continuous sides of the fracture that started the rift opening. Rifts can continue to open, but be stabilized by the regrowth of ice in the rift, until ultimately the rift calves large icebergs. Using the Oculus sonar, Icefin was able to map several kilometers of the underwater landscape; part of the data is shown in the picture above. This data will help the Icefin team understand how ice base topography, circulation, and melt water affect the formation of ice in the rift, and how the rift is evolving in time.
This map of the Icefin survey of the McMurdo Ice Shelf Rift shows the 4 km section mapped using Oculus sonar. Pink lines are a driving route the team took across the sea ice (3-5m thick) to their three operating sites. The jagged edge is the edge of the ice shelf (~15m thick), and three launch sites (marked 19A, 19B, and 19C) were the starting point for five missions (colored lines) under the opening rift (the gray shaded area). Image and dives compiled by Justin Lawrence.
“Forward-looking sonars are particularly valuable for understanding the scale of the environment the vehicle is operating in. With cameras we get great resolution, but range is typically limited to meters, due to how much energy lighting requires. With a sonar however, we can see tens to hundreds of meters in a wide swath. This lets us conduct mapping missions such as those under the rift. With the FLS we can see both edges of the feature and understand lengths, thickness trends, and variation in ice morphology indicative of changes in ocean properties,” said Justin Lawrence, Georgia Tech graduate student and Icefin team member.
During the 2019-2020 season, the Icefin team had equal efforts at both Thwaites Glacier and Ross Ice Shelf. In one field season, the Icefin crew had two teams, two vehicles, and two Oculus MD sonars operating at the same time, a major achievement for everyone involved! In both locations, the vehicles had to travel down narrow boreholes through about 600 meters of ice to reach the oceans below, described here. These results are currently being written up, and we’re looking forward to showing more once the papers are ready.
View of the Oculus sonar data (blue screen at left) being used by Britney Schmidt (hand) and Daniel Dichek to navigate Icefin as it approached the grounding line of Thwaites Glacier, January 2020.
The Oculus sonar equipped on both icefin vehicles provided scientists with important data that will be used to better understand the nature of the Thwaites Glacier, the Ross Ice Shelf, grounding zones, and may provide insight into what ice-covered oceans on other worlds might be like. Sonars are also key parts of the navigation for underwater vehicles, and will be important for future spacecraft missions.
“The Oculus sonar has been a great addition to the Icefin platform. Not only has it performed flawlessly in the harsh Antarctic environment, it also plays a crucial role in how we navigate the under-ice environment. With no light and very little information about our surroundings we would be lost without the MD750d,” said Matt Meister, Icefin Lead Engineer.
Icefin’s work in Antarctica was funded by both NASA as part of PSTAR project RISE UP, and by NSF as part of the International Thwaites Glacier Collaboration (ITGC). Both missions were the result of massive collaborations. The Thwaites project was a collaboration with the British Antarctic Survey and made possible by the ITGC, and included an critical contribution by the British team, who drilled the borehole. On the Ross Ice Shelf, the Icefin team worked with the Antarctica New Zealand Ross Ice Shelf Programme, which is funded by New Zealand Antarctic Research Institute (NZARI), with hot water drilling funded by the Victoria University of Wellington and managed by the VUW Antarctic Research Centre’s Science Drilling Office.
Our 2019-2020 Icefin field team during the last dive we did near McMurdo Base, before we split into two teams. Each team had a robot to conduct deep field dives, one below Thwaites Glacier and the other beneath Ross Ice Shelf.
Georgia Tech scientists get first look deep under Antarctica’s Thwaites Glacier and Kamb Ice Stream
ANTARCTICA — An international team including scientists from Georgia Tech captured new images and first-of-its-kind data from deep beneath an Antarctic glacier, which will help scientists to better understand the impact of one of Antarctica’s fastest changing regions and its impact on future sea level rise.
Their work will be featured as part of a special report on BBC World News on Tuesday, Jan. 28, in celebration of the 200th anniversary of the discovery of Antarctica.
Stationed in Antarctica for the last two months, the MELT (Melting at Thwaites grounding zone and its control on sea level) team, part of the International Thwaites Glacier Collaboration, deployed ocean instruments and cored sediments to gather data on one of the most important and hazardous glaciers in Antarctica. The MELT team included Georgia Tech scientists who used an underwater robot named Icefin to navigate the waters beneath Thwaites Glacier and collect data from the grounding zone – the area where the glacier meets the sea.
“We designed Icefin to be able to finally enable access to grounding zones of glaciers, places where observations have been nearly impossible, but where rapid change is taking place,” said Schmidt, a co-investigator on the MELT project. “We’re proud of Icefin, since it represents a new way of looking at glaciers and ice shelves. For really the first time, we can drive miles under the ice to measure and map processes we can’t otherwise reach. We’ve taken the first close-up look at a grounding zone. It’s our ‘walking on the moon’ moment.”
Located in a remote part of Antarctica, where few scientists have ever ventured, the team battled sometimes hostile weather, extreme winds, and temperatures below -22 degrees Fahrenheit to get close enough to the Antarctic coastline for Icefin to reach the grounding zone.
In these trying conditions, the MELT team used hot water to drill through up to 2,300 feet – nearly a half mile – of ice to get to the ocean and the seafloor below. On Jan. 9 and 10, Icefin swam more than a mile from the drill site to the Thwaites grounding zone, to measure, image, and map the glacier’s melting and gather other important data that scientists can use to understand the changing landscape and conditions. Not only did the team put one Icefin robot down the borehole at Thwaites Glacier, but they did it with a second Icefin vehicle in collaboration with Antarctica New Zealand near the grounding zone of Kamb Ice Stream, part of the Ross Ice Shelf.
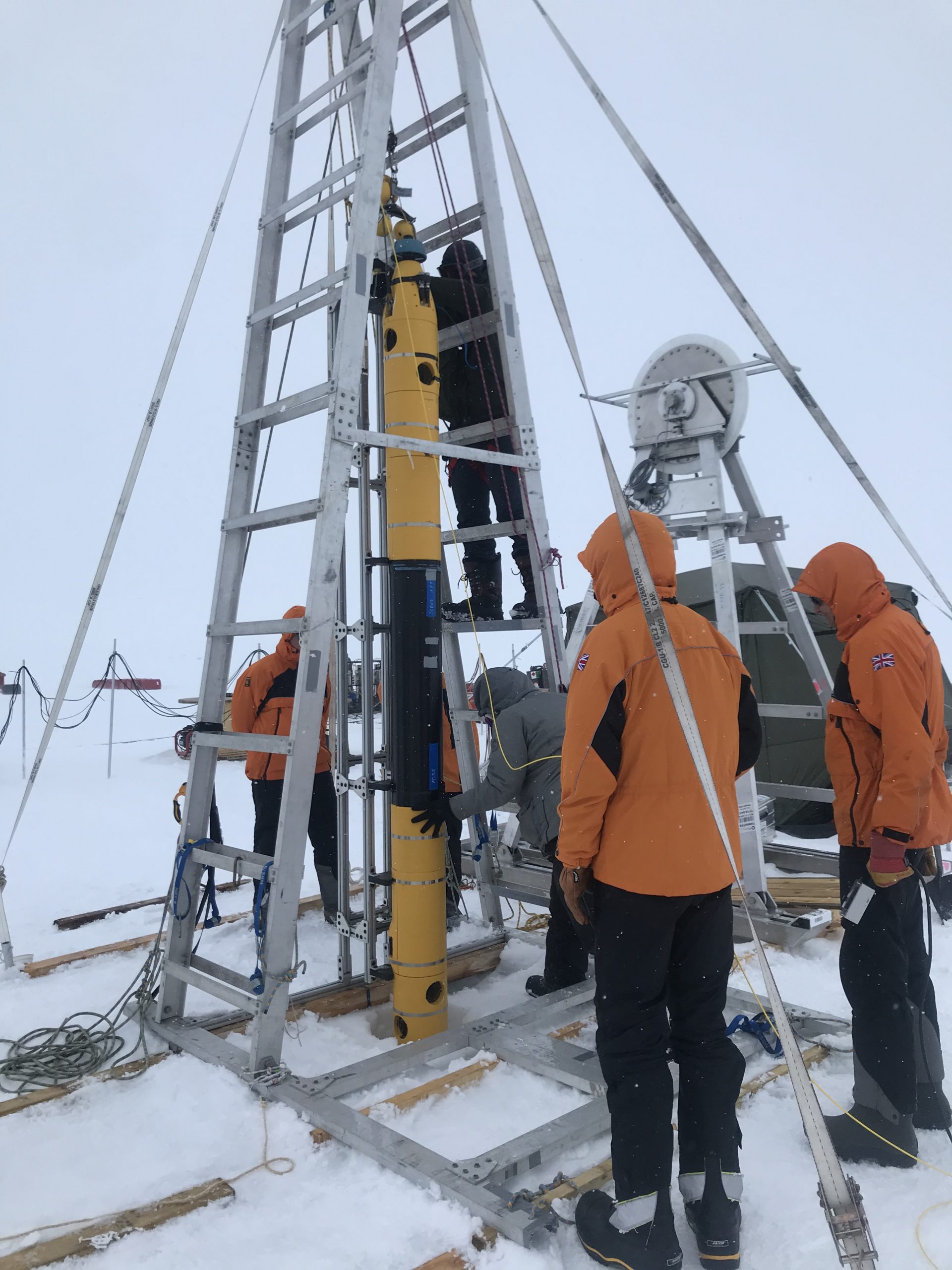
Wind storm at Thwaites Glacier blows snow over the drill tower, Icefin launch frame and control tent.
Scott tent camp at Grounding Zone camp, Thwaites Glacier in Antarctica.
The BAS drill team lowers the hot water drill head into the hole to begin drilling through Thwaites Glacier.
Paul Anker, BAS lead hot water driller and Keith Nicholls, BAS view GoPro footage of the newly bored hole in Thwaites Glacier.
Icefin team members and BAS team assess Icefin deployment.
Icefin team members and BAS team assess Icefin deployment.
Andy Mullen ran outside operations for the Icefin dives, including managing the fiber optic tether down to the vehicle.
Dan Dichek conducting an Icefin systems test in the control tent at Thwaites Glacier.
Thwaites Glacier, which covers an area the size of Florida, is particularly susceptible to climate and ocean changes. Thwaites melting accounts for about 4 percent of global sea level rise, and the amount of ice flowing out of Thwaites and its neighbouring glaciers has nearly doubled in the past 30 years, making it one of Antarctica’s most rapidly changing regions.
Dr. Keith Nicholls, an oceanographer from British Antarctic Survey and UK lead on the MELT team, said Icefin’s exploration of sediment and other conditions in the Thwaites grounding zone will help scientists determine how this region will change in the future and what kind of impact on sea level rise we can expect from these changes. The MELT team also deployed radars and oceanographic sensors, conducted seismic studies and took sediment cores from beneath the glacier, and deployed two moorings through the ice that will record ocean and ice conditions for the coming year to monitor changes at Thwaites.
“We know that warmer ocean waters are eroding many of West Antarctica’s glaciers, but we’re particularly concerned about Thwaites,” he said. “This new data will provide a new perspective of the processes taking place, so we can predict future change with more certainty”
The MELT project is funded by the International Thwaites Glacier Collaboration (ITGC), a collaboration between the U.S.’s National Science Foundation and the UK’s Natural Environment Research Council.
From left, (1) Icefin image of sediment laden ice at the grounding zone of Thwaites Glacier, Antarctica. (2) Icefin view of the grounding zone of Thwaites Glacier, Antarctica, in less than one meter of water. (3) Icefin image of sediments and rock in the ice at the grounding zone of Thwaites Glacier, Antarctica.
“To have the chance to do this at Thwaites Glacier, which is such a critical hinge point in West Antarctica, is a dream come true for me and my team. The data couldn’t be more exciting,” Schmidt said. “And exploring the grounding zones of two different glaciers in the same season is incredible.”
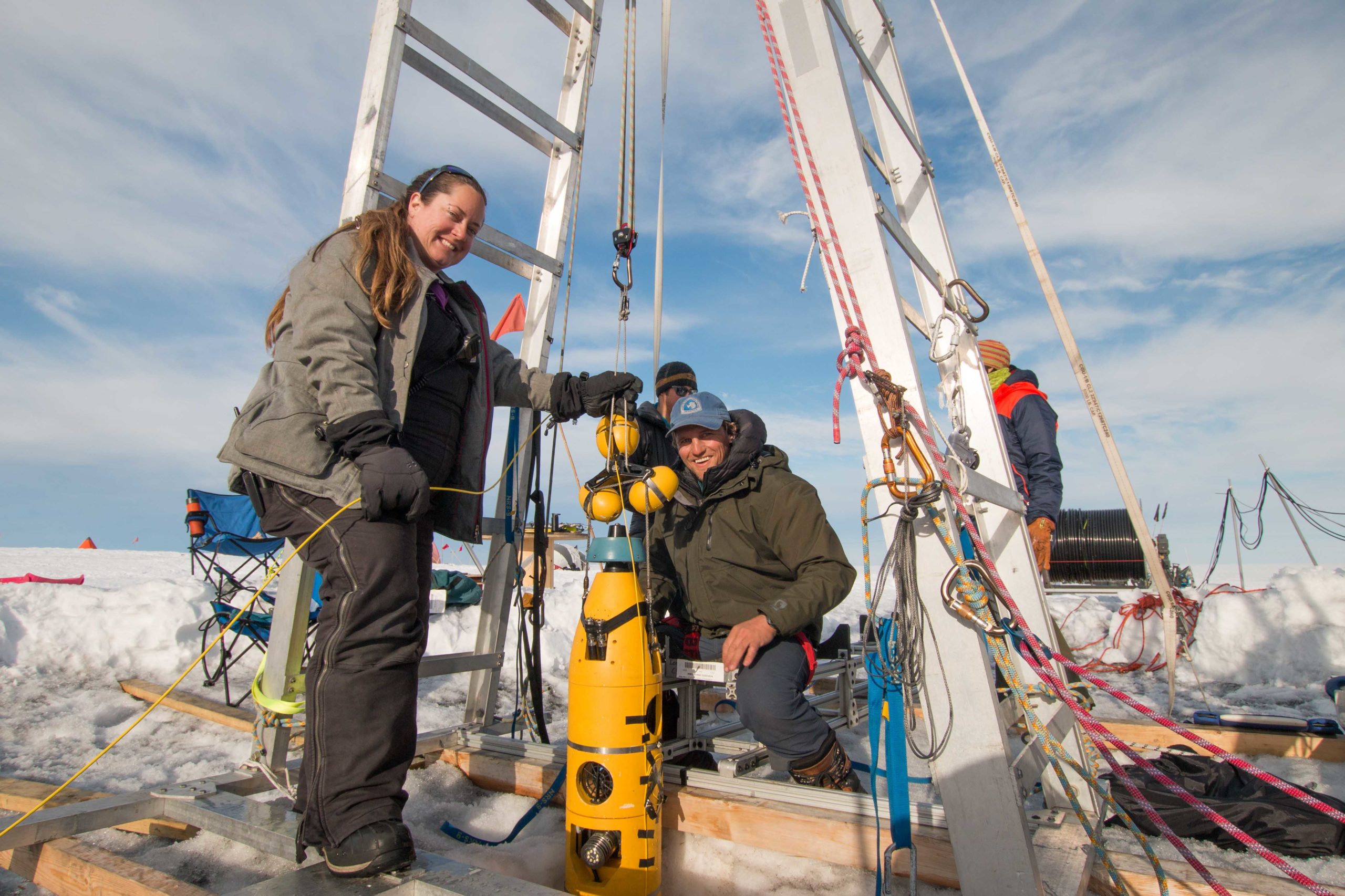
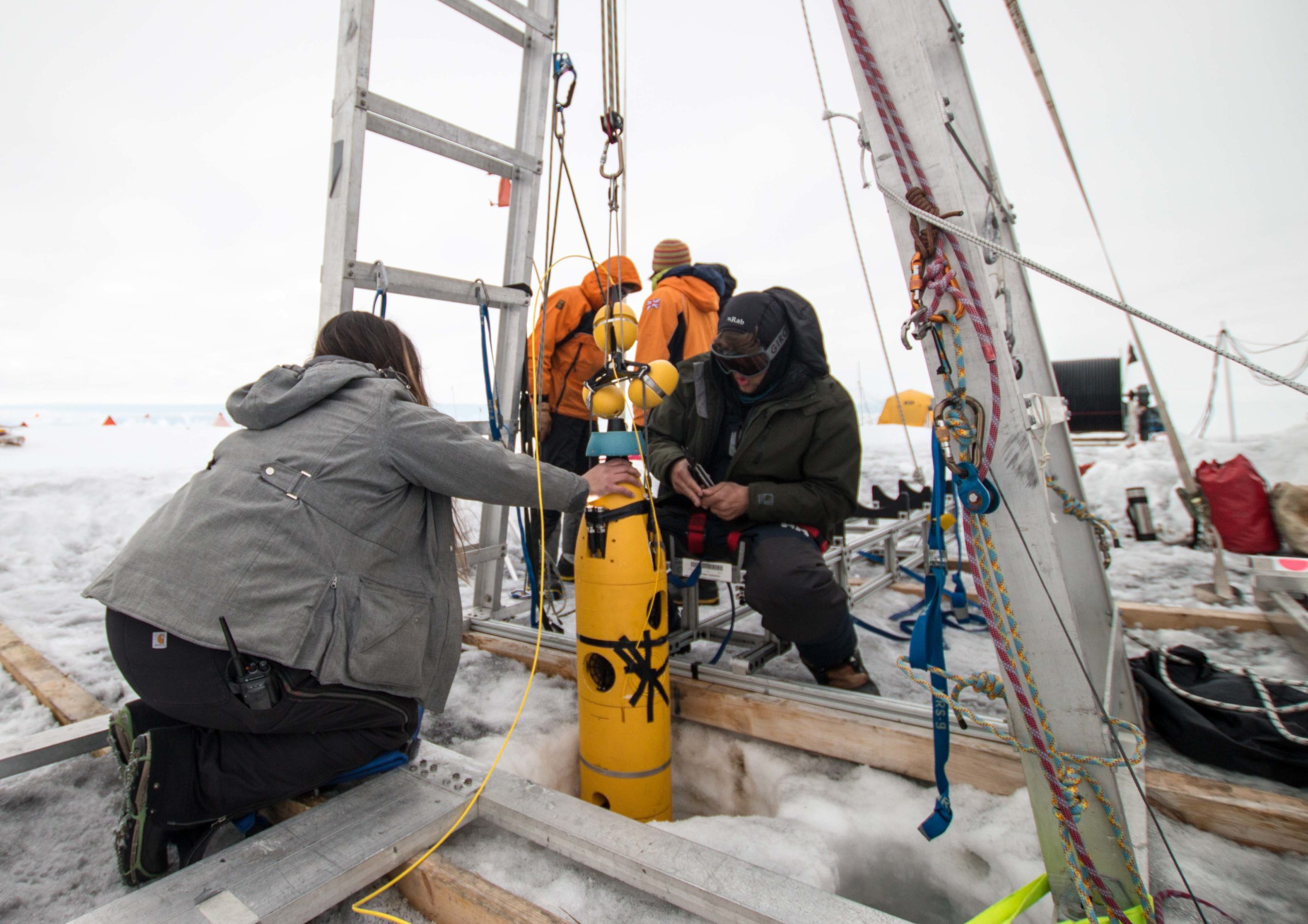
Icefin is retrieved after its last dive at Thwaites Glacier, 1/12/2020.
Britney Schmidt and Andy Mullen retrieve Icefin after its last dive.
Britney Schmidt and Andy Mullen retrieve Icefin.
Team photo after Icefin’s last Thwaites Glacier deployment, 1/12/2020. James Wake, Britney Schmidt, Catrin Thomas, Paul Anker, Dan Dichek, and Andy Mullen.
The MELT and BBC team at Thwaites Glacier. David Holland, Aurora Basinski, James Wake, David Vaughan, Andy Mullen, Peter Davis, Justin Rowlatt, Elizabeth Clyne, Jemma Cox, Britney Schmidt, Kiya Riverman, Daniel Dichek, Catrin Thomas, James Smith, Paul Anker, and Keith Nicholls.
In addition to the MELT project, Schmidt is the Primary Investigator for the RISE UP (Ross Ice Shelf and Europa Underwater Probe) project, which also had team members from Georgia Tech deployed in Antarctica this season. RISE UP is a NASA-funded project that developed Icefin from a prototype to a full-fledged underwater vehicle and aims to develop technology for future missions to Jupiter’s moon Europa.
Both the MELT and RISE UP teams spent time at McMurdo Station, Antarctica conducting research, before simultaneously deploying to more remote areas. Antarctic logistics for both projects were supported by the National Science Foundation, under the United States Antarctic Program.
RISE UP‘s work at Kamb Ice Stream came as part of a collaboration with two projects supported by Antarctica New Zealand: the NZARI Ross Ice Shelf Programme led by Dr Christina Hulbe of the University of Otago, and the NZ Antarctic Science Platform’s Antarctic Ice Dynamics project, led by Dr Huw Horgan of Victoria University.
RISE UP team members deployed along with the New Zealand hot water drilling and science teams to study the Kamb Ice Stream – a river of ice – on the Ross Ice Shelf in Antarctica. Their goal was to explore and map areas near the grounding zone to better understand its flow and the surrounding environment. Icefin’s work at Kamb Ice Stream will continue next season as part of Dr. Horgan’s project.
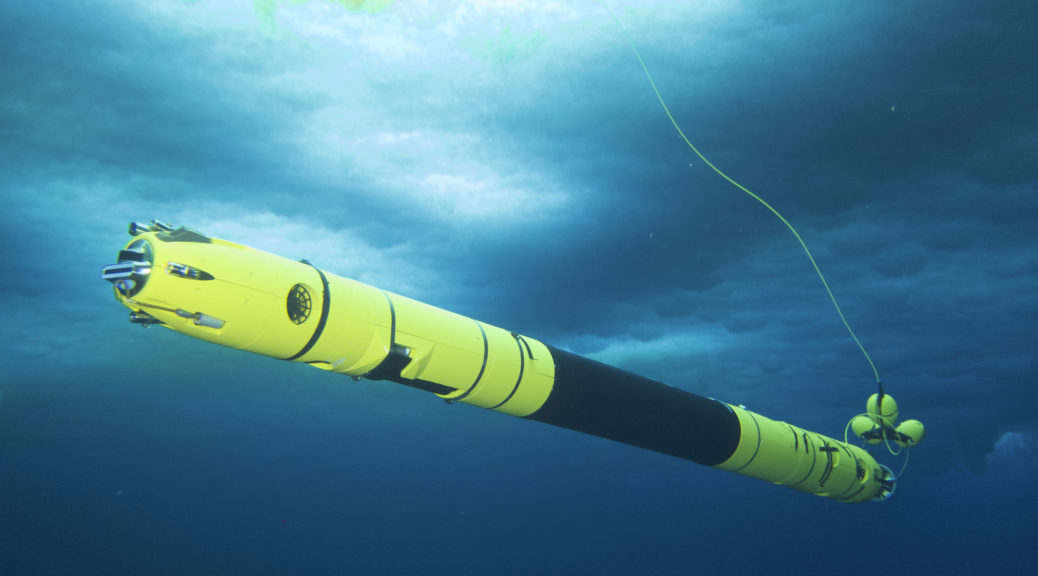
Icefin under the McMurdo sea ice in Antarctica. Photo from Rob Robbins, USAP Diver
Icefin team deploying Icefin at the grounding zone of Kamb Ice Stream, 12/18/2019. Ben Hurwitz, Peter Washam, Justin Lawrence, Matt Meister, and Enrica Quartini.
Icefin covered with icicles as water dripped down the vehicle while being retrieved from under the Kamb Ice Stream.
“We now have, effectively, a transect of conditions from the front of the Ross Ice Shelf to the grounding line,” sadi Christina Hulbe of the Ross Ice Shelf Programme, which finished its final year of field work in late December. “In addition to Icefin’s work, we’ve installed our third ice-anchored mooring, collected cores for sedimentary and microbiological analysis, we’ve imaged the ice optically and using radar, and made high resolution observations of ocean conditions.”
The RISE UP team completed three dives with Icefin, and team member Ben Hurwitz, a graduate student at Georgia Tech who works on Icefin’s technology, said the season was wildly successful, adding the team was “excited to share what we found in the coming months.”
The MELT Project is lead by Keith Nicholls , an oceanographer with the British Antarctic Survey (BAS), and Dr. David Holland, an applied mathematician (with a background in fluid dynamics) at New York University, with co-leads Dr. Eric Rignot from the University of California at Irving, Dr. John Paden with George Mason University, Dr. Sridhar Anandakrishnan out of Pennsylvania State University, and Dr. Britney Schmidt at the Georgia Institute of Technology.
RISE UP’s field work at Kamb Ice Stream came as part of two science projects funded by Antarctica New Zealand and the Victoria University of Wellington Science Drilling Office. The other research partners involved on the project are: The University of Otago, Victoria University, University of Canterbury and University of Waikato, NIWA and GNS Science from NZ and the ROSETTA project and Universty of California, Santa Cruz in the US.
Well, folks, that time we’ve been waiting for is upon us: the Icefin teams are about to attempt dives at the grounding zones of the Kamb Ice Stream and Thwaites Glacier!
Figure 1: Andy, Britney and the Kamb Team wait for the transport van in explorer pose.
Figure 2: Andy helps the Kamb Team load their gear.
RISE UP at Kamb Ice Stream Camp with ANZ
In exciting news, all members of the Icefin KAMB team are now on site at the edge of the Ross Ice Shelf, and are as we type working towards Icefin’s first dive through the grounding zone. Matt, Justin, Ben, Peter, and Enrica have been busy preparing Icefin and helping with general duties at the Antarctica New Zealand field camp. Hot water drilling at the site began this week and science is underway! Keep your eyes on @the_Ross_Ice_Shelf_Programme on Instagram for more updates! When we’re able to get a few updates and maybe an image or two we will also update you on Icefin’s social media.
Figure 3: The team was thrilled when Matt departed, the first Icefin team member to move out to a deep field camp.
Figure 4: We’re finally on the transport list to Thwaites!!
Icefin team headed out to Thwaites Glacier
The International Thwaites Glacier Collaboration program has been waiting for a break in the weather at WAIS divide camp to get to move folks out to camp. In a week of emotional highs and lows, the weather finally broke in our favor and the first flights to get ITGC personnel into WAIS divide camp and on to their field sites happened late Wednesday, with MELT’s own James Wake, along with USAP safety lead Loomy, and GHC member/radar guru Seth Campbell made it out! The team of three made it to the grounding zone down stream (GZDS) Site where the first hot water hole will be drilled. The safety team was able to land at the site and successfully establish camp. Since then, the intrepid pilots of the Twin Otter and Basler aircraft, both USAP flown by Kenn Borek Air out of Canada and the British Antarctic Survey TO, have completed many rotations to start bringing gear out to the camp. The Basler being able to land at both Cavity Camp (where colleagues in TARSAN will be working) and at GZDS has meant that much faster gear delivery has been possible, making up time from the early season weather delay.
Later in the week the second wave of the team, consisting of the British Antarctic Survey drill and science team, made it on a flight out of McMurdo to WAIS, where Paul Anker and James Smith went to the LTG field camp to break all out all of the drill equipment which was staged over winter to be sent to GZDS. The remaining team, PI Keith Nicholls, mountaineer Catrin Thomas, and Pete Davis proceeded on to the camp site at GZDS where they are establishing camp and receiving gear. The Icefin portion of the MELT team, Twin Otter and Basler aircraft, both USAP flown by Kenn Borek Air out of Canada and the British Antarctic Survey TO, have completed many rotations to start bringing gear out to the camp. The Basler being able to land at both Cavity Camp (where colleagues in TARSAN will be working) and at GZDS has meant that much faster gear delivery has been possible, making up time from the early season weather delay. Later in the week the second wave of the team, consisting of the British Antarctic Survey drill and science team, made it on a flight out of McMurdo to WAIS, where Paul Anker and James Smith went to the LTG field camp to break all out all of the drill equipment which was staged over winter to be sent to GZDS. The remaining team, PI Keith Nicholls, mountaineer Catrin Thomas, and Pete Davis proceeded on to the camp site at GZDS where they are establishing camp and receiving gear. The Icefin portion of the MELT team, consisting of Britney, Dan, and Andy are currently all packed up and eagerly waiting their flight to WAIS Divide, which is waiting on good weather to leave MCM. They’ll be joined by PI David Holland and Aurora Basinski-Ferris, as well as members of the TARSAN team. In addition to all the oceanographers, the team was also joined by the final MELT field team members lead by Kiya Riverman, who will be a few days behind the Icefin and NYU teams.
Figure 5: David Vaughn gave a truly inspiring Sunday night science lecture about the Thwaites program and its role in predicting and mediating sea level rise.
Hurry Up and Thwaites
During the weather delays, the Icefin team has kept as busy as possible. It’s rare to get a few weeks to catch up, particularly from generally exasperated PI Britney. We’ve used the extra time to make progress in several important areas. Britney has finalized her chapter for the upcoming Planetary Astrobiology book (University of Arizona Press) and been trying to help lead Editor Vikki Meadows as much as possible. She also submitted a Nature Geoscience paper with the Dawn team, and sent back revisions on two planetary science papers by current and former students that should be soon submitted. LPSC abstracts have also been edited for the grad and undergrad students in Atlanta. Now she’s trying to finish proofs on the chapter and this weekly-ish update!! Andy has been working hard to bring the in situ microscope designed for Icefin closer to being ready or field operations, and has made great progress with the extra time. Dan has been working on the redesign of Icefin’s power system and collecting various media to pass on to the BBC and NOVA crews working with the MELT team. Dan is looking forward to helping be team cameraman along with David and Aurora while we’re out at Thwaites. And while we would all have rather been out in the field, having the chance to go to the Helo Hanger concert was a social highlight of the season. McMurdo is an incredibly artistic and talented community, and getting to see several of our friends and colleagues play life music is always a treat, and ran the gamut from folk music to indie rock to a Green Day cover band.
Figure 6: Dan cleans the sea water tank in the Crary Lab as the Icefin team prepares to deploy to Thwaites. Lots of gear return and space cleaning happened this week!
Figure 7: Gemma from BBC films Icefin being driven up to Science Cargo.
While at McMurdo the MELT portion of the Icefin team had the opportunity to work with a film crew representing BBC News and BBC Frozen Planet II. Britney gave an interview describing Icefin and its role on the ITGC initiative, as well as insight into how she became a planetary and earth scientist. The BBC team then filmed Britney, Dan, and Andy preparing the vehicle to be sent to the deep field. The three person BBC team and ITGC lead David Vaughn of BAS have been fun additions to the crew, bringing a different perspective on the potential reach of these critical activities. We’re honored to be a part of it!
Figure 8: Justin, Gemma and Ben from BBC with Icefin in the Icefin Crary Lab “studio.”
Figure 9: Some of the weather contributing to our delays was rather wonderful! Huge fluffy snow came down over three days, culminating in a massive snowball “fight” on Sunday. Mostly we just ran around and tossed snow in the air.
This update would be remiss without mentioning the absolutely herculean efforts of several parts of the community over the past few weeks.
First and foremost, the WAIS Divide and LTG camp staff have been real heroes, working with a fraction of the people they had planned to get the camp up and running, establishing runways and weather reports, and supporting the flotilla of small aircraft who have been keeping the Thwaites dream alive! Cargo movements and camp activities have been underway despite the weather and small crew, the camp mechanics have done a fabulous job getting the traverse equipment up and running, and the carp team now has the camp ready for full time science support. They’ve been doing all of this in heaps of Condition 1 weather, i.e. REALLY HORRIBLY AWFUL. We owe these guys a ton!
Figure 10: Another time-honored tradition in McMurdo: trying, and failing, to prevent getting the crud. Britney looks forward to one day being reunited with her real voice.
Figure 11: Crevasse rescue training with Catrin, MELT team mountaineer.
Next up: the KBA and BAS pilots. These teams fly into challenging places and make great things happen. Their efforts to get the landing sites surveyed for safe landings, and taking care of all of our cargo and passengers is absolutely critical.
Figure 12: Andy practices crevasse descent.
Figure 13: Ready to get out to Thwaites!!!
Finally: the implementer team, lead by Leslie Blank and Nick Gillett. Every time there is a delay, it changes the plans downstream, and this team has been doing an amazing job of staying on their toes, and keeping things moving forward. It’s easy to feel trapped and get down when these delays occur, but the implementer team has been doing a remarkable job of juggling unknown weather and excitable science teams. So that’s it for now!
Michelle Babcock from the GT Icefin team will be sending out some blurbs from us while we’re out in the field. Enrica and crew will pick up the bulky emails and photos when they return from Kamb, currently sometime just before or after the new year. Brit, Dan and Andy will be out in the field until probably middle to late February, so look for our next check in around Feb 1. Happy holidays to you all out there, and thanks so much for everything you do to support us, from watching cats to sending treats, to fixing machinery, and everything in between!
This year the field team for Icefin consists of:
Britney Schmidt, Matt Meister, Dan Dichek, Anthony Spears, Justin Lawrence, Ben Hurwitz, Andy Mullen, Peter Washam, and Enrica Quartini.
Sorry for the long delay between updates, friends! The Icefin team has been busy at work the past few weeks with both dive operations and deep field preparations, all culminating with a lovely Thanksgiving holiday. We’ve finally found the time to dig out the pen and ink (or computer, I suppose).
Figure 1: Icefin under the ice, photographed by USAP Diver Rob Robbins who was diving nearby.
On November 14, we were joined by the rest of the C-444 Thwaites-Melt team, including Keith Nicholls, Peter Davis, James Smith, Paul Anker, Catrin Thomas and James Wake from the British Antarctic Survey and David Holland and Aurora Basinski-Ferrisof NYU.
Figure 2: The Icefin and Melt teams took a moment for a group photo on the ice.
Figure 3: Still from an Icefin dive under the rift, showing the approximate vehicle position under the rift. The screen segments show vehicle attitude and depth on the left and snapshots of live data values we use to QC the data.
Among the highlights since our last update were our final four science dives in the McMurdo area. The team deployed Icefin at two additional sites along the roughly East-West running ice shelf rift that has been our primary science target of our operations out of McMurdo. This allowed us to map the structure of the underside of the rift along over a good segment of its length. As far as we know, this is possibly the first detailed and the most comprehensive underwater study of an ice shelf rift.
Figure 4: Forward looking sonar profiles of the narrow end and broad end of the rift, looking up.
Rift formation is an important part of ice shelf evolution that contributes both to stabilizing the ice and to calving, depending on the setting and ocean conditions. With Icefin and its suite of oceanographic, biological, and perception sensors, we have surveyed the structure of the rift, ocean conditions underneath it to assess marine ice healing of the rift, as well as parameters that describe the water column conditions that affect ecosystems under the ice. We conducted three survey missions, including at two new sites, 19C and 19A, that allowed us to start at the narrow end of the rift where it begins as a crack to places where it splits into two systems, with segments as wide as 40m. Hopefully when combined with satellite remote sensing, we will have an excellent data set for comparison.
Figure 5: Data from dive 9 showing the ice surface (gray), ice base (black) and vehicle position (colored for depth). Each of the data streams can be plotted in a similar fashion to construct 3D data sets.
To some people, all ice looks the same, but to ice nerds like our team (ok, maybe mostly to the PI and science team), all of the varying ice structures and conditions beneath the rift are fascinating. The draft (depth) of the ice varies by up to 10m below the rift, with everything from semi-regular conical platelet lumps on either side to down-dropped blocks covered in platelets but with preserved angular features. We could watch (and have watched) the videos for hours.
Figure 6: Bathymetric sonar data from Icefin’s new Norbit sonar, processed using the Qimera software package. During this part of the dive, we swam close to the edge of Observation Hill as it meets the seafloor.
During our last dive, we deployed ICE03 at the Jetty (fish hut 19) and put together a basic mission to map sections of the bathymetry offshore McMurdo at great resolution with our new Norbit bathymetric sonar (another first for the team!) in preparation for our work to come out at Thwaites glacier. Excitingly, we also got to use this dive as an opportunity to train the rest of the MELT team on Icefin operations. The BAS and NYU teams got a chance to participate in deploying the vehicle, to see Icefin in action, and recover the vehicle. We also took a few great team photos.
Figure 7: Montage of the BAS-USAP Deep Field Shakedown. Top: Dan and Andy get schooled on the Primus lamp by BAS mountaineer James Wake, and Britney and Dan hang out in the Scott Tent, which will be what the team lives in during the Thwaites season. Bottom: James demonstrates the Tilly lamp operation as Keith, Pete, David and Aurora look on.
It’s also been a time of training for our team, in preparation for the deep field. The part of the team going to Kamb Ice Stream (KIS) camp received a half-day Antarctic field training from Antarctic New Zealand while the MELT part of the team had an overnight training on the sea ice led by British Antarctic Survey mountaineers. The Kamb team had a dry run of camp arrangements and plans way back in October before deploying to the ice, but got to work with the ANZ crew on safety procedures for the camp. Because national programs have their own protocols for safety and operations, getting to participate in safety training prior to working together allows for a common language in the field.
Figure 8: Tent city out on the ice shelf (left) and the late-night view through the clouds back towards the instructor hut and Mt. Discovery.
The full Melt team completed our deep-field shakedown, where we had the opportunity to camp out for a night on the ice shelf as a team using the equipment we’ll be using out in the deep field. For the Icefin team, this was our first chance to experience the famous “man food” boxes that BAS is contributing to the project. We were introduced to Biscuits Brown and a surprising variety of dehy meals. The best part was definitely working with the classic Primus stoves and Tilly lamps. We’ve since had a course on their upkeep and repair as well, and are feeling ready for the field, whenever that should happen!
Figure 9: Packed house for the Wednesday night MELT lecture.
Figure 10: Seal in the dive hole while Icefin patiently waits to confirm heading solution.
On Nov 20, David Holland organized the Melt team to give the Wednesday night lecture as a team to describe how the whole filed program will work, and the scientific motivation behind it. David, James Wake, Paul, Britney, Pete Davis, James Smith, Aurora, and Keith all gave short presentations about the field campaign, drill, and science plans. Britney introduced the Icefin team and described the plans for Icefin working at the grounding zone. The Crary Library was packed with folks curious about this large piece of the International Thwaites Glacier Collaboration.
Figure 11: Thwaites crew plus Enrica enter the final boxes into cargo, and begin the wait to fly out.
Prior to the talk, part of the team also got to go over and visit Scott Base for dinner to catch up with our colleagues Greg Leonard and Maren Richter. Next year, we’ll be deploying Icefin along with these folks under Inga Smith’s Marsden project through the University of Otago. Following that work on the sea ice, we’ll be hoping to also join for a second season out at Kamb.
Figure 12: Paul Cutler introduces Britney and Icefin to the crowded galley for the Sunday night public lecture.
On Nov 24 Britney gave the Sunday night science lecture to a packed audience in the galley, who stuck around the talk for at Q&A session and swarmed in to take a look at Icefin’s science and navigation modules, which the team brought to the galley. It’s always one of the highlights of the season to get to share our work with and thank the community that works so hard to support the work we do. We showed videos of the missions under the rift as well as highlights from last season, and stuck around for an hour afterwards answering questions and hanging out with the robot.
Figure 13: Icefin pops through the platelet ice, viewed by our OpenROV Trident.
The final push over the past two weeks has been to finish the season and get the two teams packed up for the deep field. As of today, both Icefins are packed and the team is patiently waiting for the weather to cooperate and allow flight opportunities to KIS camp and Thwaites camp. The weather has so far kept both teams in town, a full week of delays thus far for the Kamb team and ANZ drillers due to weather on the Siple coast. Thwaites operations have also slowed due to weather, but the site safety team (John “Loomy” Loomis, Seth Campbell, and James Wake) going in to prove the camp site is ready to fly on the next flight out. The positive note has been that we all got to spend Thanksgiving celebrations in McMurdo, have a delicious meal all together, and enjoy calling home for the holidays. The team participated in the Turkey Trot 5k, shared the Thanksgiving tradition with our British colleagues for their first Thanksgivings, and had the chance to spend more time together as a full team in advance of what will hopefully be the move out to Kamb this week for the ICE02 team.
Figure 14: We’ve been treated to some rare and beautiful snow days in McMurdo lately. This shot is from our dorm 207, back towards the Galley (blue), Southern, Crary lab, and Observation Hill in the background. Atop Ob Hill is across left by the returning party in honor of Robert Falcon Scott and his team that made it to the south pole, only to die in tragedy 12 miles from their food depot. The team heard two fantastic lectures by Artist & Writers program participant Sarah Airriess who is writing and illustrating a graphic novel about the expedition.
This year the field team for Icefin consists of:
Britney Schmidt, Matt Meister, Dan Dichek, Anthony Spears, Justin Lawrence, Ben Hurwitz, Andy Mullen, Peter Washam, and Enrica Quartini.
(Note: This post was written before a week-long delay due to weather and before Matt, our lead engineer, managed to make it out, but most of it still holds.)
I’m anxious.
Not nervous. Anxious.
Our bags are packed. The vehicle and it’s associated spares, tools, and other miscellany have been boxed and are sitting in the airfield waiting to be loaded into a Basler tomorrow for our deep field deployment to the Kamb Ice Stream.
The anxiety comes from the waiting.
Three years of waiting for this to happen.
The deep field.
Maybe that should read “The Deep Field”.
It feels like something that’s so far away, both spatially and temporally. But within twelve hours, we’ll be heading there to do something that nobody has ever done before.
Three years of preparing.
More for Britney. I can’t imagine her anxiety levels. And she won’t even be there when the vehicle accomplishes its mission, its purpose, for the first time.
(Don’t worry, we’ll take pictures.)
660 meters of ice. That’s 2165 feet. Half a mile. With a 14″ wide hole down, down, down to the bottom. To the underside of the Ross Ice Shelf.
The Ross!
The largest ice shelf in the world. (By area only, as Peter keeps saying; by volume, the Filchner-Ronne is larger).
And we’re going to the bottom.
The anxiety is real.
Does that come across in this blog? Are you anxious with me?
I’ve never been to The Deep Field before. I hope I packed right. Mostly that’s base layers, socks, and a toothbrush.
A month in the middle of nowhere.
Never before will I have been so far from, well, anything.
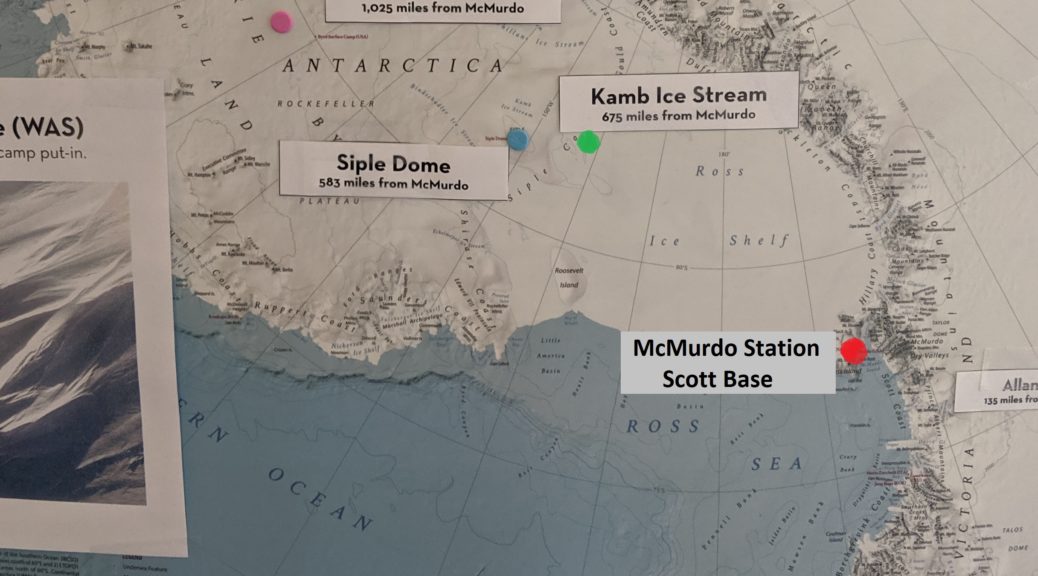
KIS-1 (“Kamb ice stream 1”), also called HWD-1 (“Hot water drill 1”), is located at 82.77S, 156.57E. The nearest anything is Simple Dome camp, at 81.65417S, 149.005E. And that’s a field camp, not exactly a bustling place. But that would be the closest actual place, 105 miles approximately north.
The Ross Ice Shelf and surrounding region with select USAP and ANZ deep field sites marked. McMurdo and Scott Base locations are marked separately.
Looking at it from that perspective, it’s possible I’ve been farther from people before.
But I don’t think that it’ll feel that way once we’re there.
Due to some unforeseen circumstances (the C-17 delays and the weather at other sites delaying flights), we’ve gotten lucky. We’ll be flying out a touch earlier than expected, and we’ll be flying with the drillers. So we’ll be among the first out there. This is extremely valuable; the Thwaites project has been massively behind due to the same flight delays, and thus all flights from McMurdo have been pointed towards their staging ground at WAIS Divide (79.4675 S, 112.0864 E). Thus we need to get a flight to KIS-1 before the Thwaites flights start taking people. Because then we become a much lower priority for USAP. Which is fair; Thwaites is a $25 million project, whereas KIS-1 is not even a US-sponsored field camp.
The Basler we’ll be flying is a modified DC-3. A DC-3! The plane was around prior to WWII! The Baslers, though, have excellent records in Antarctica. They have upgraded avionics and engines, modified fuselage and wings, and a host of other new features. Which is reassuring. I was a little perturbed when I was told it was a DC-3.
By the time you read this, we’re likely to already be in camp, setting up tents, building snow walls to ward off the wind, and checking out the vehicle. I’ve been told that The Deep Field focuses you. You’re forced to have singular purpose. Distractions are removed from sight and mind.
Based in McMurdo Station, Antarctica for the first part of their 2019 field season, the team on Project RISE UP is using its underwater oceanographer robot Icefin to study environmental and biological factors that influence habitability in oceans beneath ice.
Project RISE UP, an acronym which stands for “Ross Ice Shelf and Europa Underwater Probe”, is using Icefin to explore ice-ocean environments and the limits of life here on Earth, in order to help develop techniques that might be used for future exploration of ice-ocean ecosystems.
NASA confirmed in 2019 that Europa, one of Jupiter’s moons, had plumes of water vapor above its surface, which scientists had long expected from the ice-covered world. In addition, using observations from ground-based telescopes, “scientists have found strong evidence that beneath the ice crust is an ocean of liquid water or slushy ice,” according to NASA. These and other factors make Europa a prime subject in the search for other habitable worlds in our solar system.
Georgia Tech graduate student and member of the RISE UP team in Antarctica, Justin Lawrence‘s thesis is a major driver of work being done in the 2019 field season. He said the science and technology being developed through RISE UP could be used in the future exploration of icy worlds in our solar system, such as Europa.
“For my thesis, I’m mapping biological water mass properties including cellular abundance and microbial diversity with physical water properties such as temperature, salinity, and dissolved oxygen,” Lawrence said. “When combined, these variables help us understand how nutrient and carbon inputs from the open ocean and melting ice influence habitability below ice.”
In other words, studying biological and environmental factors that influence life in ice-ocean ecosystems here on Earth, will help scientists understand habitability in ice-covered oceans elsewhere.
“Earth is not the only body in our solar system with a liquid, salty ocean, and other ocean worlds such as Jupiter’s moon Europa might prove habitable to novel forms of life,” Lawrence explained. “To better understand how ecosystems under ice could work on other planets, we are developing hardware (Icefin), software, and scientific methods to first understand the interactions between life and ice in Antarctica.”
The diagram above depicts the unique circulation patterns that result from atmospheric cooling of the surface ocean, sea ice formation, ocean currents, and ice shelf melting to distribute nutrients below Ross Ice Shelf. The Ross Ice Shelf, located in Antarctica, is a floating mass of ice the size of Spain, which gets up to nearly 1 kilometer thick.
In addition to research being conducted at McMurdo Station in the 2019 field season, RISE UP will also fly with Icefin to the Ross Ice Shelf grounding zone, in collaboration with New Zealand’s Ross Ice Shelf Programme, where they will deploy Icefin along with other oceanographic sensors through a 35 cm wide, 700 m deep hole in the ice to explore the ocean below (as shown in the diagram above).